





























2-19
TI71M01D06-01EN 3rd Edition: 2012.12.01
2.7 Stop Function in Error State
When an error occurs, the DrvGIII has the servo-deceleration function to bring the motor to a
stop at the shortest possible free running distance.
The servo-deceleration function decelerates the motor by servo immediately after a specified
error occurs.
2.7.1 Servo-Deceleration
The servo-deceleration function is executed immediately when the defined error occurs.
The servo -deceleration can be performed even in the case of a power failure because the
control power is kept alive by internal capacitors for approximately 100msec (at rated voltage).
The holding time length may be shortened by the power environment, operation condition and
connection of operation display pendant / operation display panel. Also, the holding time
length differs depending on the drive power output.
Detecting condition for the power failure is variable by the power monitoring cycle setup by
“the parameter #110. System setup register 1.”
Effective Range of Servo-Deceleration
For specified error, the reaction of drive, how to execute the servo-deceleration, is available to
set. Refer “6.1.4 Process Settings in Error State” for the detailed setup method. The error
process settings disclose the related #parameters on the condition that the user bears the
responsibility for any result by settings.
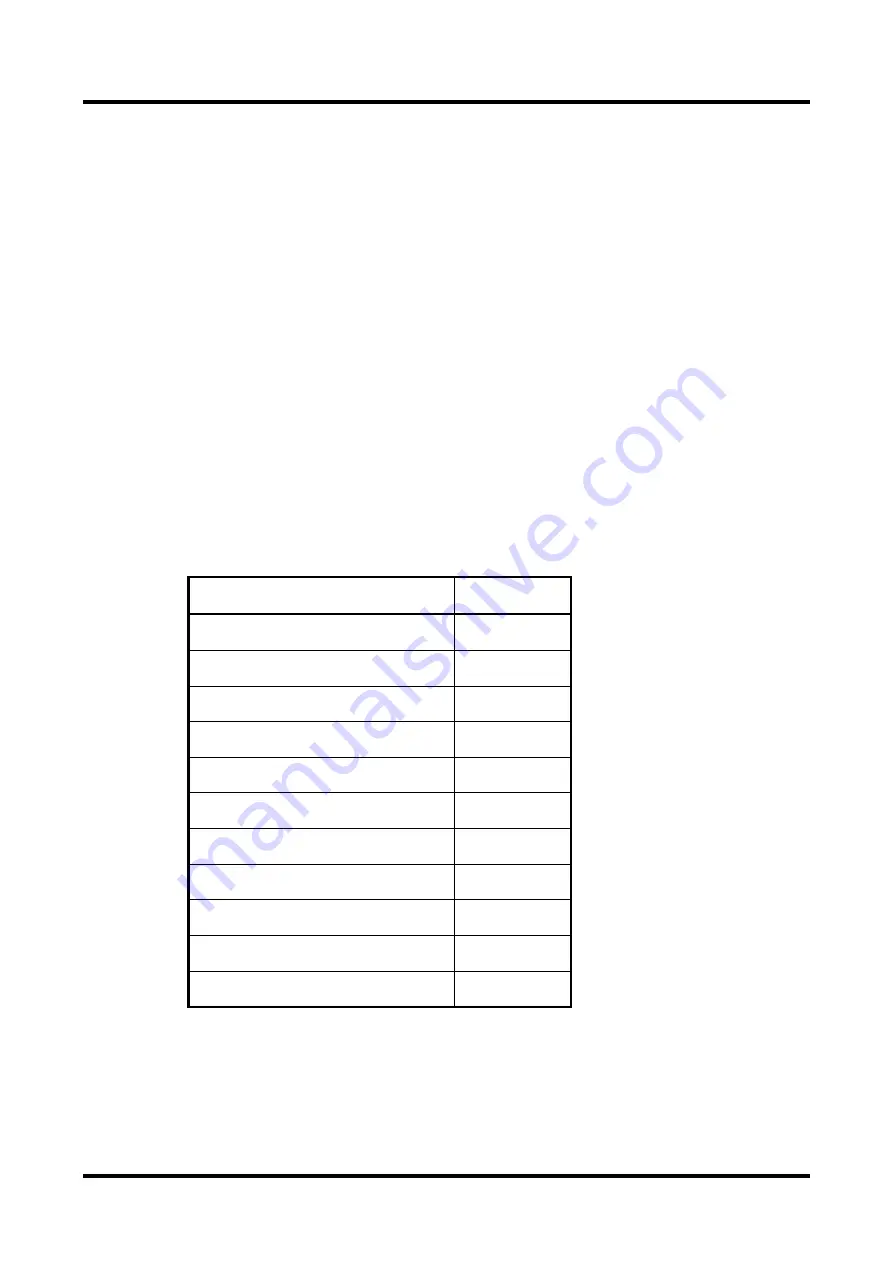
Errors that can use the servo-deceleration function
Error name
Error code
Over speed
24.0
Overload
22.1
22.2
Excessive position error
23.0
Excessive commanded position
differential value
31.0
Coordinate error A
16.1
Bus voltage dropping
20.3
AC mains power supply voltage error
21.0
Hardware EOT
42.0
43.0
Software EOT
44.0
45.0
Controller interface communication
error
47.0
Interface emergency stop
46.2