


























6-34
TI71M01D06-01EN 3rd Edition: 2012.12.01
(2) Setting the Direction of Coordinate Systems
It is possible to reverse the rotation direction of the motor.
<Setting method>
STEP 1 Select [#parameter] from the main menu of the utility software.
STEP 2 Open the Register parameter tab and then the System Setup Register 1 panel.
STEP 3 Set the rotation direction in Coordinate System Forward Direction Setting from the
System Setup Register 1 panel.
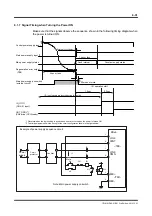
Rotation Direction Corresponding to the Coordinate System Forward Direction Setting Status (Output Torque
Direction in the Torque/Thrust Control Mode)
Coordinate system forward direction
setting: Forward direction
Coordinate system forward direction
setting: Backward direction
CW direction
CCW direction
CW direction
CCW direction
Jog move
IN_JOG_UP
IN_JOG_DN IN_JOG_DN IN_JOG_UP
Table data operation
+ direction
- direction
- direction
+ direction
Coordinate system forward direction setting is preset to "Valid" at shipment from the factory.
(3) Scaling
Conversion
By using the scaling conversion function, it is possible to freely set the ratio of the amount of
motor movement relative to the instructed amount.
The unit system consists of two types of coordinate systems: command unit coordinate
system and pulse unit coordinate system.
The command unit coordinate system is used for the commands by the built-in controller, and
the pulse unit coordinate system is used for the coordinate system between the drive and the
motor.
The conversion rate of these two unit systems is set in scaling conversion.
Scaling Conversion Formula
CW direction
CCW direction
Pulse unit =
#112 [Scaling data ratio denominator (on the command unit)
#113 [Scaling data ratio numerator (on the pulse)
x
command unit(s)