



























7-13
TI71M01D06-01EN 3rd Edition: 2012.12.01
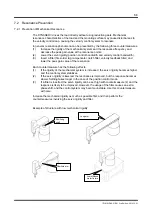
Pos_FF (#14) = 100%, Vel_FF (#15) = 100%, Acc_FF (#16) = 0%
10ms/DIV
This waveform shows when the position FF #parameter
is set to 100% from the factory default state.
Positioning is completed mostly without overshooting in
the vicinity of the target position. The settling time is
almost 0.
The commanded position value and
the actual position value are overlaid
CH4 position error (pulse)
CH3 coin (no position error) status
Target position
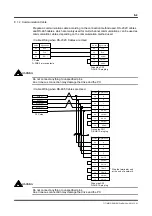
Pos_FF (#14) = 110%, Vel_FF (#15) = 100%, Acc_FF (#16) = 0%
10ms/DIV
Settling time
The actual position is ahead of the target position in the
entire travel path (the delay immediately after startup is
due to the influence of static friction).
Although significant overshooting has occurred in the
vicinity of the target position, the settling time is shorter
than the factory default setting.
CH2 actual position value
CHI commanded position value
CH4 position error (pulse)
CH3 coin (no position error) status
Target position
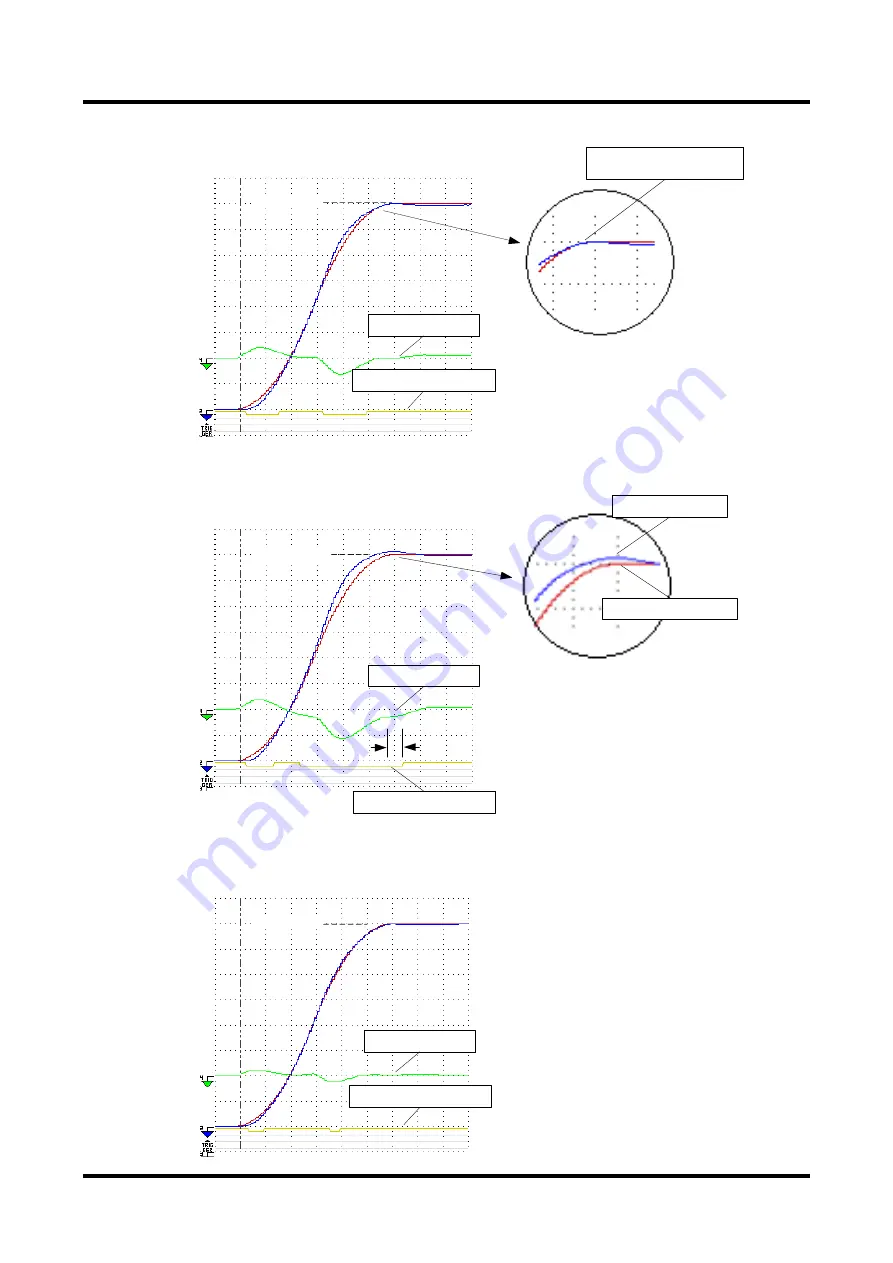
In the case of good adjustment: Pos_FF (#14) = 99%, Vel_FF (#15) = 100%,
Acc_FF (#16) = 100%
10ms/DIV
In this example, the position FF #parameter and the
acceleration FF #parameter are adjusted.
T he a ct ua l posit io n a l most e nti re ly t rac ks t he
commanded position in the entire travel path. Thus, the
coin (no position error) status signal is always output.
However, since the acceleration FF #parameter has been
set to a large value, the servo sound is slightly large.
CH4 position error (pulse)
CH3 coin (no position error) status
Target position