





























6-96
TI71M01D06-01EN 3rd Edition: 2012.12.01
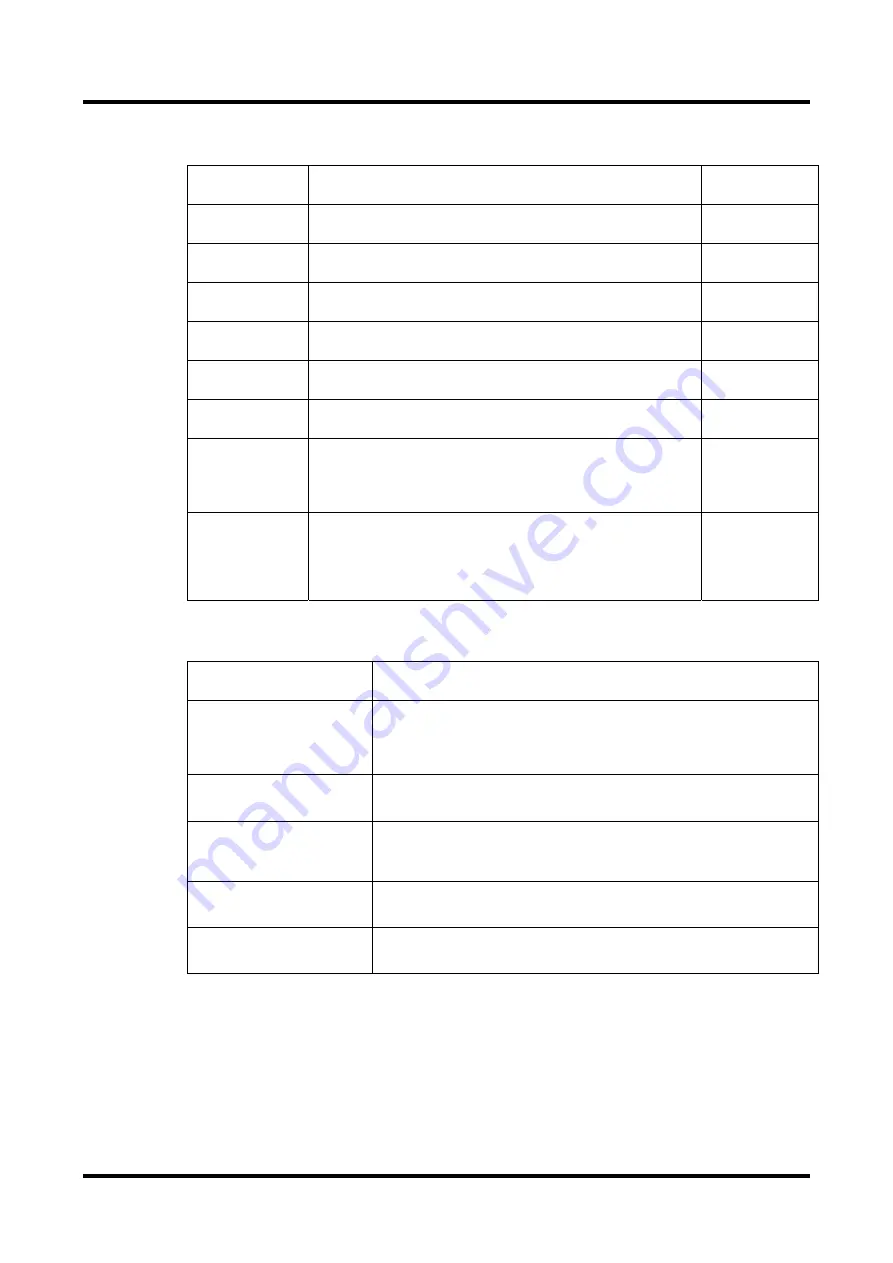
Increment Positioning Move Operation Data 0 and 1
Name Description
Default
Setting
Coin width
Select the settling width at homing operation from coin widths 0 to 7 (#90
~ #97).
Position settling
width 0
Select acceleration
time
Select the acceleration time from acceleration times 0 to 3 (#72 ~ #75).
Acceleration time 0
Select deceleration
time
Select the deceleration time from deceleration times 0 to 3 (#76 ~ #79).
Deceleration time 0
Select acceleration
type
Select either "constant acceleration" or "S-curved."
Constant
acceleration
Select deceleration
type
Select either "constant acceleration" or "S-curved."
Constant
acceleration
Select velocity
Select the feed velocity from feed velocities 0 to 7 (#64 ~ #71).
Constant
acceleration
Optional move
direction for rotation
coordinate
It is not necessary to set this parameter when the linear coordinate
system is used. (Either the linear coordinate system or the rotation
coordinate system can be selected for the coordinate system in system
setup register 1.)
See the table below.
Type 0 (short way
around)
Direct or indirect
If [Direct] is selected: The relative target position is set by operation data
1. The unit is axis command unit.
If [Indirect] is selected: Select #parameter/#monitor and
#parameter/#monitor numbers in operation data 1. The value of the
selected #parameter/#monitor is set to the relative target position. The
unit is axis command unit.
0 (Disabled)
Movement Direction Setting Types at Rotation Coordinates and Rotation Directions
Movement direction setup value
in rotation coordinate system
Motor rotation direction
Type 0 (short way around)
Rotate in the direction that yields the shortest distance to the relative target position
from the current position command value. (The motor rotates in the + direction if it
is rotated exactly 180 degrees.) Even if the target position is set in such a way as to
cause rotation of 360 degrees or more, the amount of movement will be less than
360 degrees.
Type 1 [do not cross the home
position]
The motor moves in the same direction as the sign of the relative target position set
in table data relative to the home position. If the motor crosses the home position, it
is moved in the opposite direction. The motor never rotates 360 degrees or more.
Type 2 [multiple-rotation]
The motor moves in the same direction as the sign of the relative target position set
in the table data relative to the home position. If the relative target position is set in
such a way as to cause the motor to rotate 360 degrees or more, the motor may
rotate several times.
Type 3 [fixed rotation dir]
The motor always moves in the + direction. Even if the target position is set in such
a way as to cause rotation of 360 degrees or more, the amount of movement will
be less than 360 degrees.
Type 4 [fixed rotation direction -]
The motor always moves in the - direction. Even if the target position is set in such
a way as to cause rotation of 360 degrees or more, the amount of movement will
be less than 360 degrees.