



























6-26
TI71M01D06-01EN 3rd Edition: 2012.12.01
6.1.5 Process Settings in Error State
The way an error is processed varies depending on the error code (see Appendix 3, "Detailed
Main Error Codes"). Moreover, for some errors, it is possible to select how the drive behaves
when an error occurs.
Specify the correct form of error process according to the specifications of the device, and set
#parameters by referring to Section 2.8, "Stop Function in Error State."
Regarding errors for which error process types can be set, see the tables in the next page,
"#parameters Related to Error Process" and "Error Process Types."
The parameters for setting error process are released under the condition that the customer
bears all responsibility in the event of unanticipated behavior.
Enabling/disabling errors
If errors are set to invalid, an error is not generated even when the error conditions are
satisfied.
Setting of error process type
This set up behavior of drive after detecting an error.
In the velocity control mode and torque/thrust control mode, analog command inputs are
interrupted and the velocity instruction value or torque instruction value to the drive is set
to zero in case the error is set for ”enabling”, regardless of type of the setting.
The same error handling process as [immediate stop] is carried in order to shut off the input.
The servo state setting after the stop is subject to the error handling process set up.
Setting of error range
Set the velocity and position ranges in which errors are generated.
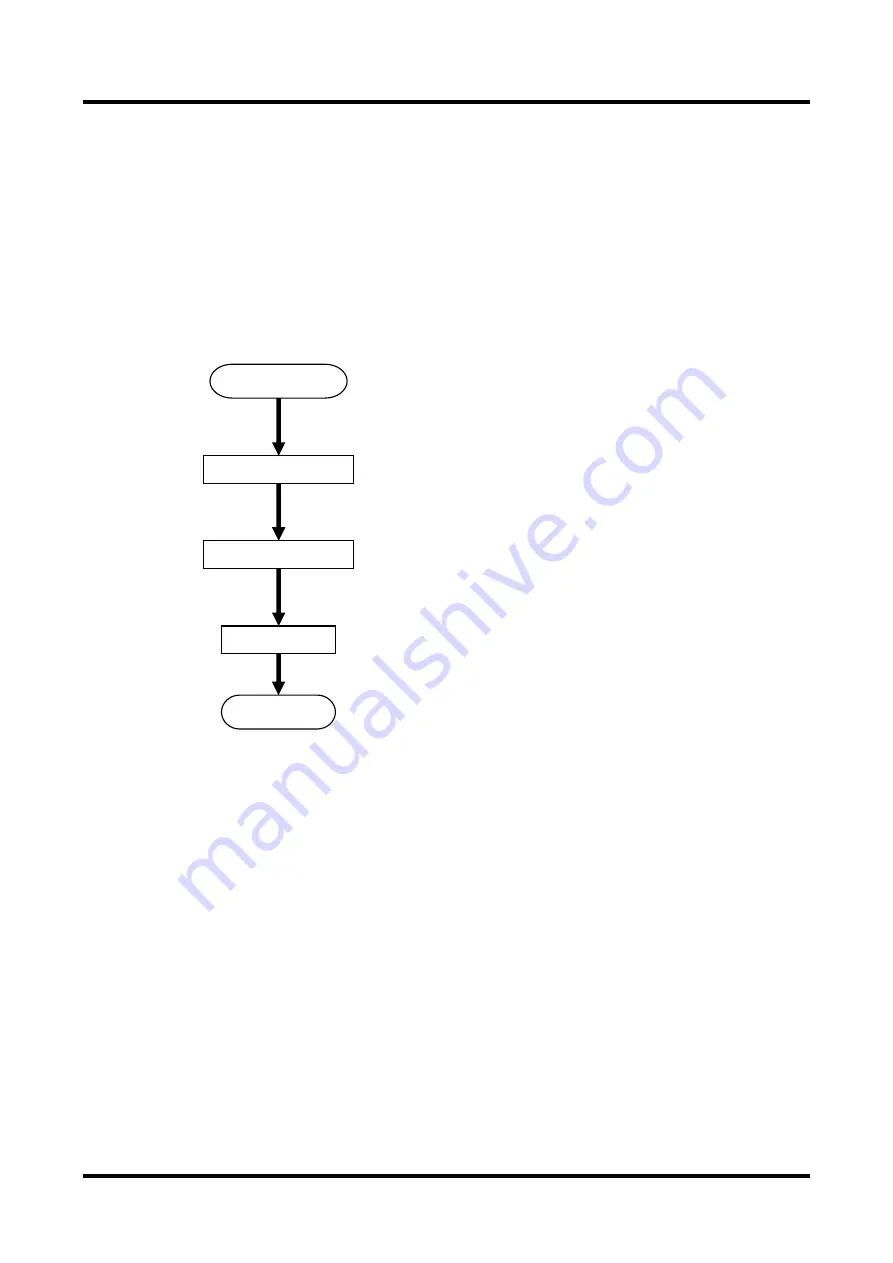
Set error process
Enable/disable errors
Enable/disable errors
Set error range
End of setting