


























7-11
TI71M01D06-01EN 3rd Edition: 2012.12.01
7.3 Settling
Time
Adjustment
7.3.1 General Settling Time Adjustment Sequence
Regarding the settling time adjustment procedure, it is advisable to assign #parameters in the
order shown below.
To adjust within the coin window quickly, it is also effective to select [S-curve profile] for the
deceleration profile. Since [S-curve profile] has a smaller effect of inflection point than
[Constant acceleration/deceleration], the settling time tends to be short.
Generally, it is significantly affected by mechanical characteristics. However, it is most
effective to set the control bandwidth setting #parameter to a large value.
If there is a margin in torque,
try S-curved movement
Acquire setting upper limit of position
and velocity control bandwidths
Adjust the feed forward #parameter
[S-curved profile] requires more torque than [Constant acceleration/deceleration] (about 1.5
times). Thus, to select [S-curved profile] drive, it is necessary to suppress the value to about
70% of the maximum acceleration/deceleration when [Constant acceleration/deceleration] is
set. Make sure that output is not saturated using #330 [Commanded torque/force value]
monitor.
7.3.2 Adjustment Using the Feed Forward #parameters
One of the adjustment methods for reducing the settling time is the adjustment of the feed
forward (FF) #parameters.
Generally, FF control is a control method that compensates the commanded value in advance
for the feedback control that corrects the control result. Since FF operates for the fluctuation
of the commanded position value, it does not affect the behavior when stopped.
This drive contains the following FF #parameters:
#14 Position FF percentage (Pos_FF)
Initial value 90%
#15 Velocity FF percentage (Vel_FF)
Initial value 100%
#16 acceleration FF percentage (Acc_FF) Initial value 0%
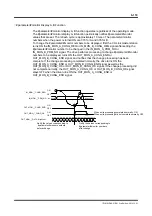
The settling time adjustment using the FF #parameters refers to an adjustment method for
controlling the shape of the position error waveform that appears on an inflection point when
finishing positioning movement (end point of command distribution) by adjusting the FF
settings, and for entering the position error amount within the range of coin window more
smoothly.
Thus, this method may sometimes be effective even if the control bandwidth setting cannot be
increased due to resonance, for example.
If the integral limiting #parameter value is excessively restricted, the effect may be small even
if FF adjustment is performed since the operation amount is also restricted, or a wind-up
condition may occur if a significantly large value is set. Adjust as necessary.
TIP