




























6-53
TI71M01D06-01EN 3rd Edition: 2012.12.01
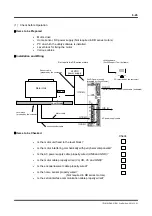
CW direction
CCW direction
(2) Parameter
Settings
STEP 1 Select [#parameter] from [Data Management] of the utility software.
STEP 2 Select "System setup register 1" to display the setting window.
STEP 3 Check the rotation direction in the Coordinate system forward direction setting.
The settings and the rotation directions have the following relationship.
Coordinate Command Direction Setup and Rotation Directions of the Motor
Jog move command
IN_JOG_UP
(+ direction)
IN_JOG_DN
(- direction)
Status of
coordinate
Command
Direction Setup
Forward
direction
Rotates in the
CW direction
Rotates in the
CCW direction
Reverse
direction
Rotates in the
CCW direction
Rotates in the
CW direction
Note: This #parameter also effects the rotation direction in operations other than jog move.
STEP 4 In "Jog feed operation, serial Interface side selection," Select [Valid] to instruct the
jog move operation from the utility software and [Invalid] to instruct the jog move
operation from the controller interface.
STEP 5 Register the #parameters by clicking the [Regist] button.
STEP 6 Specify the feed velocity, acceleration time, deceleration time, acceleration profile
and deceleration profile in the Function #parameter window (see Section 6.1.9 for
the detailed explanation of the velocity profile).
STEP 7 Select the feeding velocity, acceleration time, deceleration time, acceleration profile
and deceleration profile in the System setup register 3 window.
7 Select the
velocity profile.