




























7-16
TI71M01D06-01EN 3rd Edition: 2012.12.01
Confirmation of Load Fluctuation
If the load fluctuates, hunting tends to occur easily since the actual velocity bandwidth
fluctuates. Make sure that the velocity bandwidth at the maximum load is at least twice as
large as the position control bandwidth.
If the servo stiffness does not increase even if the FFT function is used to tune the servo, it
can be improved by adding a dummy inertia with high mechanical stiffness to make the load
fluctuation smaller. Obtain the recommended dummy inertia value (the value where the load
fluctuation becomes three times or less) from the following formula.
Recommended dummy inertia > 0.5 x load inertia at the maximum load - rotor inertia value - 1.5 x load
inertia at the minimum load
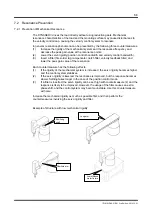
Velocity control
bandwidth at the
maximum load (5Hz)
Velocity control
bandwidth at the
minimum load (12Hz)
Frequency characteristic with the minimum load
Frequency characteristic with the maximum load
Measurement example
Application: Transfer axis for optical discs such as CD and DVD
Maximum load: No discs are placed
Minimum load: Full of discs
Load inertia #0: The auto-tuned value at the maximum load
Velocity control bandwidth #2: 5 Hz
<Characteristics at the minimum load>
Velocity bandwidth: 12 Hz
Motor operation: The position bandwidth
can be lowered to 5 Hz.
<Characteristics at the maximum load>
Velocity bandwidth: 5 Hz
Motor operation: Hunting occurs if the
position control bandwidth is set to 3 Hz
or higher. The motor is eventually used
by setting the position control bandwidth
to 2 Hz.