



























6-29
TI71M01D06-01EN 3rd Edition: 2012.12.01
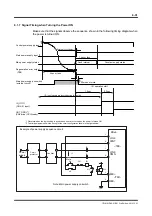
Stop Method at Error Occurrence in Each Control Mode
Table data operation
Jog operation
Deceleration met
hod
Immediate
stop
Deceleration time
Set by #80 [Deceleration
time for immediate stop].
Set by #80 [Deceleration time for
immediate stop].
Deceleration profile
Deceleration profile set in
table data
Deceleration type set using #parameter
system setup register 3
Deceleration
and stop
Deceleration time
Deceleration time set in
table data
Deceleration time set using #parameter
system setup register 3
Deceleration profile
Deceleration profile set in
table data
Deceleration type set using #parameter
system setup register 3
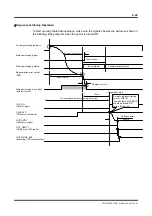
Guidelines for setting abrupt stop deceleration time (#80)
Set the deceleration torque to 100% and calculate the shortest time that can be achieved for
decelerating to a stop.
(Use the formula below for the calculation.)
Moreover, multiply the value achieved for constant acceleration by 1.5 and enter this for the
S-curved acceleration/deceleration profile.
t: Deceleration time [sec]
JM: Rotor inertia of the motor (See Section 2.1, "Standard Specifications") [kgm^2]
JL: Load inertia [kgm^2]
v:
Velocity
[rps]
T: Maximum torque of the motor [Nm]
Time
TIP
(JM+JL)*2
π
v
T
t=
Velocity
[axis command unit/sec]
#111 [maximum velocity limit]
Deceleration time setup value
Specified by the deceleration time relative to
#111 [maximum velocity limit].
Deceleration type
It is possible to choose either
constant acceleration or an
S-curved profile.
Actual deceleration time
Velocity at error occurrence