





























PATH START 8-157
88
N
O
P
Q
R
S
T
U
V
W
X
Y
Z
80
PATH START
●
CONT setting
Format
CONT
Explanation
When PATH movement is executed with CONT setting option, after all movable
axes begin to execute the final movement specified by PATH statement, movable
axes will begin to execute the next command without waiting the completion their
movement (entering the tolerance range). If the next command is a movement
command, the 2 movement paths are linked by connecting the deceleration and
acceleration sections, enabling continuous movement without intermediate stops.
This option is enabled only for the specified PATH START statement.
●
Caution regarding PATH START command with CONT setting:
If the next command following the PATH START command with CONT setting is an executable
command such as a signal output command, that next command will start immediately after
axis movement begins. In other words, that next command starts before the axis arrives within
the target position tolerance range.
Example:
Signal output (DO, etc.)
Signal is output immediately after movement along the final path begins.
DELAY
DELAY command is executed and standby starts immediately after
movement along the final path begins.
HALT
Program stops and is reset immediately after movement along the final path
begins. Therefore, axis movement also stops.
HALTALL
All programs in execution stop immediately after movement along the
final path begins, task 1 is reset, and other tasks terminate. Therefore, the
movement also stops.
HOLD
Program temporarily stops immediately after movement along the final path
begins. Therefore, axis movement also stops.
HOLDALL
All programs in execution temporarily stop immediately after movement
along the final path begins. Therefore, the movement also stops.
WAIT
WAIT command is executed immediately after movement along the final
path begins.
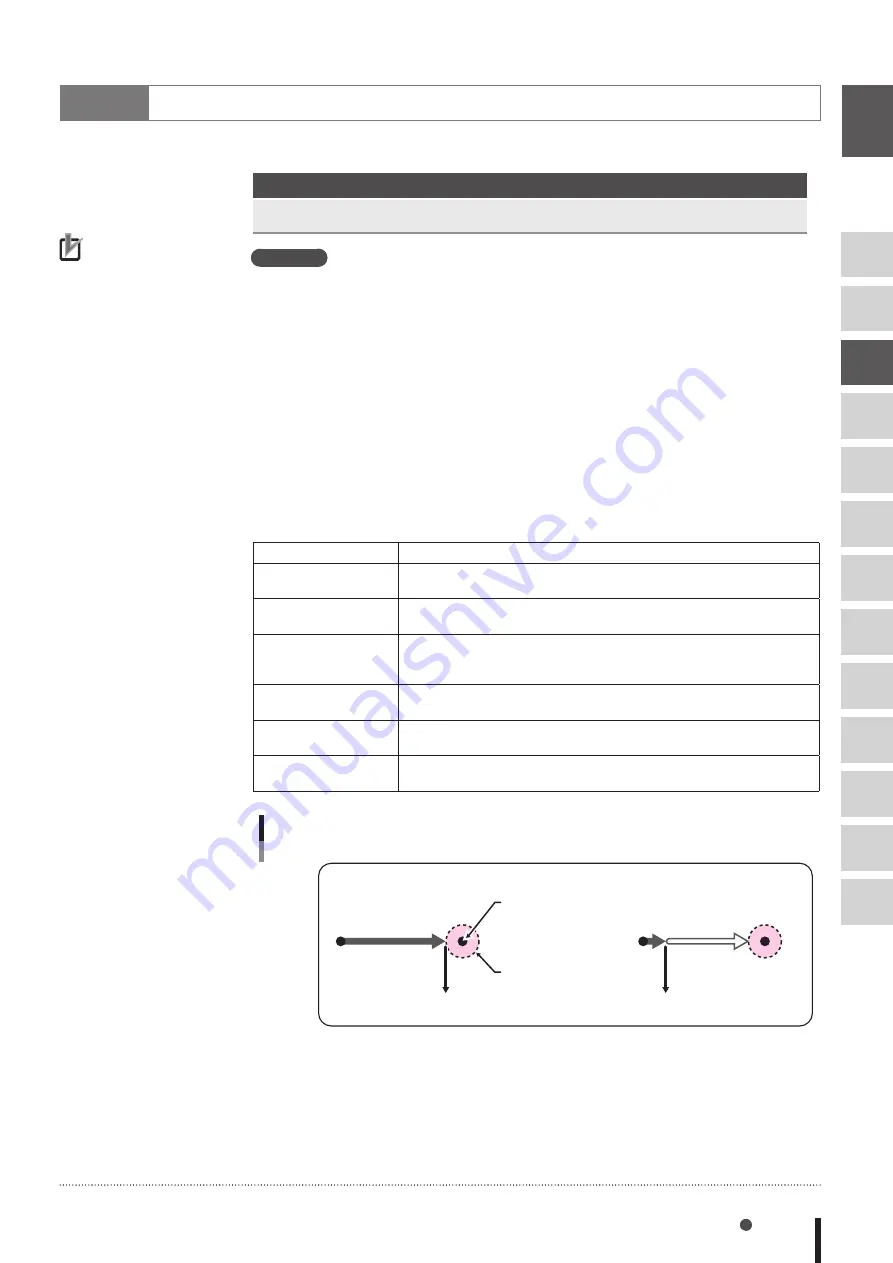
P1
PATH START command
DO(20) turns ON
PATH START,
CONT
DO(20)=1
DO(20) turns ON
PATH START
DO(20)=1
Tolerance
Final target position
33808-R9-00
NOTE
•
The CONT setting can
b e u s e d t o r e d u c e
t h e m ove m e n t S TA R T
positioning time.
•
The path to the target
point is not guaranteed.
Содержание SCARA YRCX Series
Страница 1: ... 7 6HULHV DW 1R 1 5 5RERW RQWUROOHU 352 5 00 1 0 18 6 5 5RERWV 5 6HULHV ...
Страница 2: ......
Страница 20: ......
Страница 26: ......
Страница 27: ...Chapter 2 Constants 1 1 Outline 2 1 2 2 Numeric constants 2 1 3 3 Character constants 2 2 ...
Страница 28: ......
Страница 32: ......
Страница 52: ......
Страница 54: ......
Страница 61: ...Chapter 5 Multiple Robot Control 1 1 Overview 5 1 2 2 Command list with a robot setting 5 2 ...
Страница 62: ......
Страница 66: ......
Страница 76: ......
Страница 78: ......
Страница 92: ......
Страница 328: ......
Страница 408: ......
Страница 409: ...Chapter 11 User program examples 1 1 Basic operation 11 1 2 2 Application 11 8 ...
Страница 410: ......
Страница 432: ......
Страница 488: ......
Страница 489: ...Chapter 13 Appendix 1 1 Reserved word list 13 1 2 2 Changes from conventional models 13 3 ...
Страница 490: ......
Страница 496: ......
Страница 497: ...Index ...
Страница 498: ......
Страница 504: ......
Страница 505: ......
Страница 506: ... DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH ...