





























372
Jogging
Section 10-2
4.
Set the Servo Parameters and save them.
Set the Servo Parameters required to execute direct operation.
To set parameters permanently, execute SAVE SERVO PARAMETER
(writes to the non-volatile memory).
To enable changed offline parameters, turn ON the power to the Servo
Drive again or execute DEVICE SETUP.
For details, refer to
5-3 Transferring Servo Parameters
.
5.
Execute SERVO LOCK.
6.
Set the data used for the jogging operation.
Set the jogging operation speed data in the speed command value of the
Axis Operating Output Memory Area.
7.
Start the jogging operation.
When using the PCU for the first time or to change the Common Parameter
data, steps 1 and 2 must be performed. After executing SERVO LOCK,
WRITE SERVO PARAMETER can be executed to set the acceleration/decel-
eration used each time the jogging operation is performed.
Note
When specifying the Servo Parameters for acceleration/deceleration every
time, make sure that the axis operation is stopped (Busy Flag = 0) while
changing the acceleration/deceleration constants using WRITE SERVO
PARAMETER. Do not change parameters during axis operation. Changing
parameters while the axis is operating may result in displaced positioning or
other malfunction.
10-2-3 PCU Data Settings for Jogging Operations
A simple explanation of the main parameters and data used to execute the
jogging operation is provided here. To execute jogging operations, apart from
the parameters explained here, the following parameters also need to be set
as basic settings for operating the PCU.
• External I/O Signal Allocations
Refer to
6-4 Standard Settings for Servo Drives Using MECHATROLINK
.
• Command Unit
Refer to
7-2 Control Units
.
The setting units for parameters and data depend on the specified com-
mand unit.
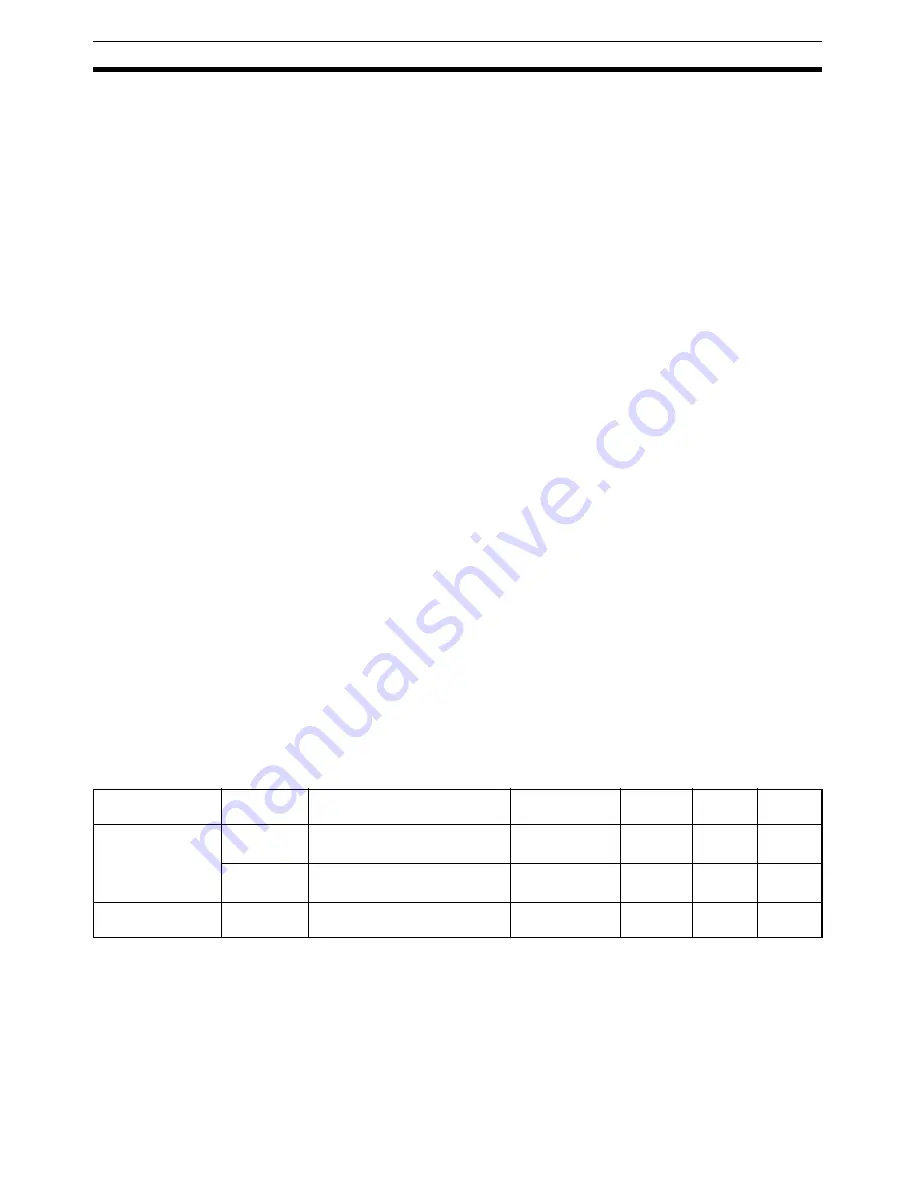
G5-series Acceleration/Deceleration Constants
Type
Parameter
No.
Parameter name
Unit
Setting
range
Data
length
Default
setting
Acceleration/
deceleration con-
stants
Pn811
Linear acceleration constant
10,000 com-
mand units/s
2
−
32768 to
32767
2
100
Pn814
Linear deceleration constant
10,000 com-
mand units/s
2
−
32768 to
32767
2
100
Acceleration/
deceleration filters
Pn818
Position command FIR filter time
constant
0.1 ms
0 to 10000 2
0
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































