





























287
Limit Input Operations
Section 7-5
Note
(1) If the limit input signal inputs (Servo Drive's forward drive prohibited sig-
nal and reverse drive prohibited signal) are not allocated, the Servo Drive
will not stop the Servomotor when the signal is input, and the PCU will
also not detect limit inputs as errors. When using a PCU, always allocate
the Servo Drive's forward drive prohibited signal and reverse drive prohib-
ited signal to enable use of the limit input signals. (Refer to
6-4 Standard
Settings for Servo Drives Using MECHATROLINK
.)
(2) Make sure that the limit input signals maintain a signal width no shorter
than the MECHATROLINK communications cycle. Input signals that are
shorter than the communications cycle cannot be detected by the PCU.
When using a G5-series Servo Drive, a G-series Servo Drive or a W-series
Servo Drive, the Servomotor's stop operation at the Servo Drive when a limit
input signal is input or a software limit is reached is set in the Servo Parame-
ters for limit input operations.
When using a SMARTSTEP Junior Servo Drive, the Servo is locked after
decelerating to a stop with the maximum Servomotor torque. The following
function cannot be used.
Servo Parameters
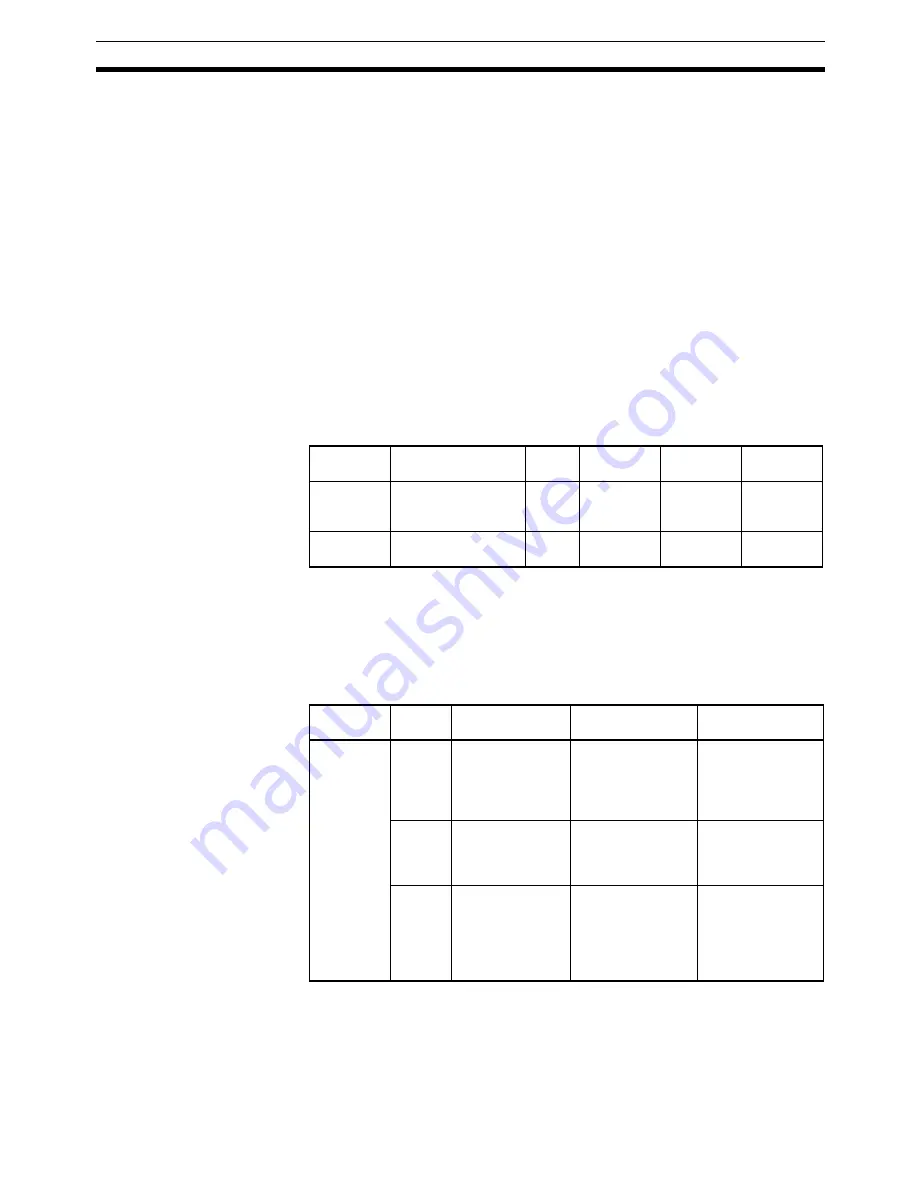
G5-series Limit Input Parameters
Pn505 is used to set the stop operation of the Servomotor when a for-
ward/reverse rotation limit is input or a forward/reverse software limit is
reached. The parameter size of Pn505 is the value to be specified when trans-
ferring the Servo Parameter Pn505 including the above settings.
The following table shows the Servomotor stop operations using Pn505 set-
tings.
Note
(1) If an operation command in the drive prohibited direction is received
when the torque command of the drive prohibited direction is disabled,
the Servomotor will not operate in the drive-prohibited direction, but the
position deviation will accumulate because the position command is en-
abled. If drive prohibition is detected, stop the operation command from
Parameter
No.
Parameter name
Unit
Setting
range
Parameter
size
Default
setting
Pn505
Stop selection for
drive prohibition
input
---
0 to 2
2
0
Pn511
Emergency stop
torque
%
0 to 500
2
0
Parameter
No.
Setting
During
deceleration
After stopping
Deviation counter
Pn505
0
Dynamic brake
Disables torque
command in drive
prohibited direction
Cleared while
decelerating with
dynamic brake.
Retained after
stopping.
1
Disables torque
Disables torque
command in drive
prohibited direction
Cleared while
decelerating.
Retained after
stopping.
2
Emergency stop
torque (Pn511)
Servo lock
Retained while
decelerating,
cleared upon com-
pletion of decelera-
tion, and retained
after stopping.
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































