





























263
Standard Settings for Servo Drives Using MECHATROLINK
Section 6-4
6-4
Standard Settings for Servo Drives Using MECHATROLINK
6-4-1
G5-series Servo Drive Settings (R88D-KN
@
-ML2 with Built-in
MECHATROLINK-II Communications)
When an R88D-KN
@
-ML2 G5-series Servo Drive (with built-in MECHA-
TROLINK-II communications) is used, the default settings for the Servo Drive
are the standard settings when the MECHATROLINK communications is
used.
Compulsory Parameter
Settings
The following Servo Parameter must be set to enable PCU control. Do not
change this setting.
Pn800 Communication Control
All MECHATROLINK communications errors and warnings are used when the
PCU is controlling communications. Set the parameter so that they are all
detected. Leave Pn800 set to the default setting.
Standard Settings for I/O Signals Using MECHATROLINK
When an R88D-KN
@
-ML2 G5-series Servo Drive (with built-in MECHA-
TROLINK-II communications) is used, the default settings for the Servo Drive
are the standard settings for the I/O signal allocations when the MECHA-
TROLINK communications is used.
Note
The PCU uses the forward drive prohibited input, reverse drive prohibited
input, and origin return deceleration limit switch allocated in the Servo Drive's
external inputs as the forward rotation limit input signal, reverse rotation limit
input signal, and origin proximity input signal, respectively. The signal widths
of these input signals must be longer than the MECHATROLINK communica-
tions cycle. If the input signal width is shorter than the communications cycle,
the PCU will not be able to detect the input signal, and operation will not be
performed normally.
Parameter
No.
Parameter
name
Unit
Fixed
setting
Details
Default
setting
Pn800
Communica-
tions control
---
0
0: MECHATROLINK-II
communications
errors and warnings
are all detected.
0
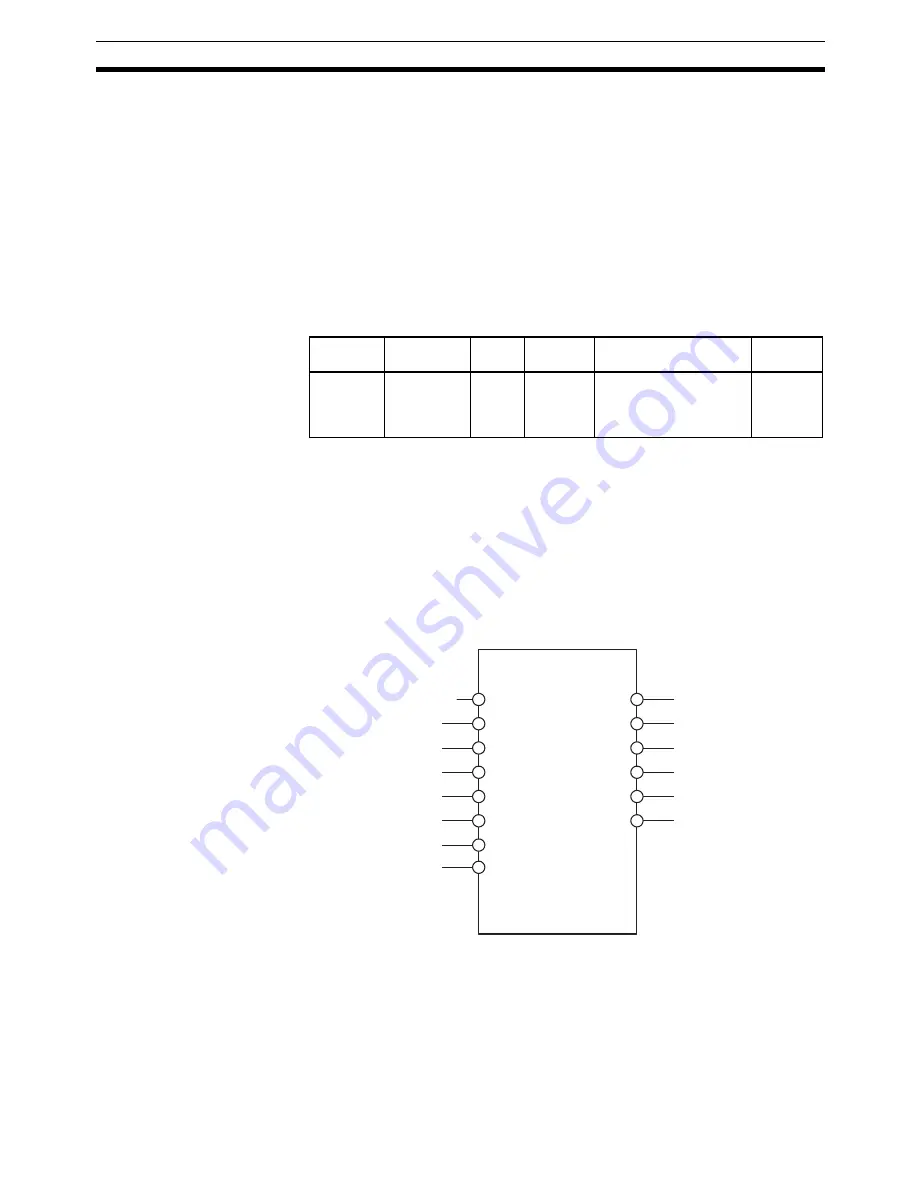
13
7
8
9
12
11
10
1
2
25
26
3
4
POT
NOT
DEC
EXIT1
EXIT2
EXT3
BKIR
BKIRCOM
READY
READYCOM
ALM
ALMCOM
STOP
5
R88D-KN
@
-ML2
CN1
General-purpose input
Standard I/O Signal Allocation
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































