





























353
Interrupt Feeding
Section 9-5
Final Travel Distance for External Positioning
for W-series Servo Drives
(Pn814) is used for internal processing in the Position Control Unit when one
of the following origin search operation patterns are selected.
• When the origin detection method is set to any value except for 0 (Origin
proximity input signal reversal)
• When setting a zero point position offset for an origin search using an
absolute encoder
Because Pn814 is automatically overwritten by the Position Control Unit when
starting the origin search operation, if using the interrupt feeding after execut-
ing the origin search in the above operation pattern, be sure to set the
Exter-
nal Positioning Final Travel Distance
for G5-series Servo Drives (Pn820), the
Final Distance for External Input Positioning
for G-series Servo Drives
(Pn203) or
Final Travel Distance for External Positioning
for W-series Servo
Drives (Pn814) again.
Axis Operating Output Memory Areas (Operating Commands)
a = Beginning word of Axis Operating Output Areas specified in Common
Para (Axis No.
−
1)
×
25
9-5-4
Timing Chart for Interrupt Feeding
Interrupt feeding is executed by turning ON the INTERRUPT FEEDING Bit in
the Axis Operating Output Area and starting direct operation.
Timing Chart for Interrupt
Feeding Using
ABSOLUTE MOVEMENT
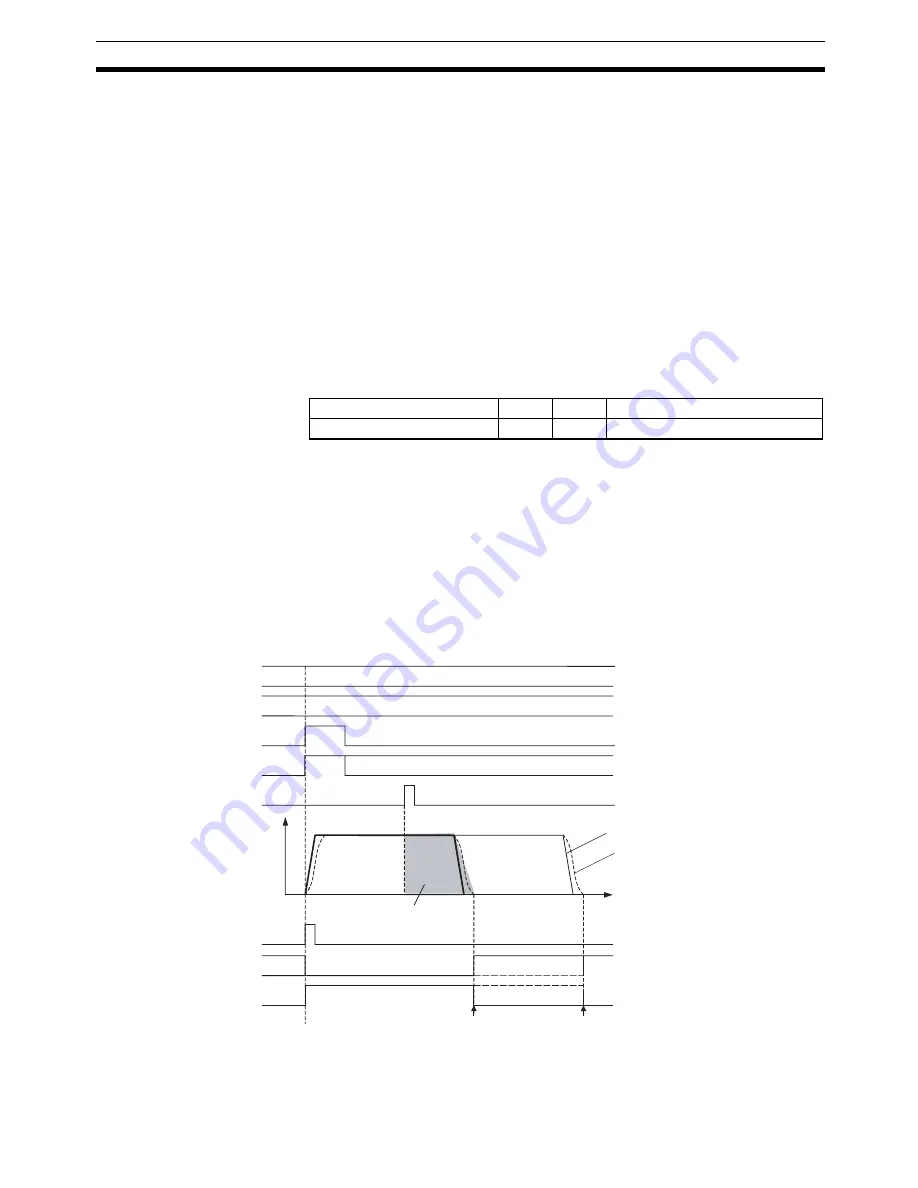
The following timing chart is for when INTERRUPT FEEDING is executed with
ABSOLUTE MOVEMENT. The timing chart for RELATIVE MOVEMENT is the
same, except that positioning is executed with the relative position if no inter-
rupt input signal is input.
Name
Word
Bits
Contents
INTERRUPT FEEDING
a
05
1: Enables interrupt feeding
2710 hex (10000)
3E8 hex (1000)
Position command value
(words a+2, a+3)
Speed command value
(words a+4, a+5)
ABSOLUTE MOVEMENT
(word a, bit 03)
INTERRUPT FEEDING
(word a, bit 05)
Interrupt input signal
Speed
Receiving Command Flag
(word b, bit 00)
PCU Positioning Completed
Flag (word b, bit 05)
Busy Flag (word b, bit 13)
Final travel distance for
external positioning (Pn814)
Positioning when internal
input signal is input
Target speed: 1,000
(command units/s)
The INTERRUPT FEEDING is
enabled when the bit for the
movement command turns ON.
Solid line: Command speed
Broken line: Feedback speed
Time
Positioning when no internal input signal is input
(absolute position: 10000 (command unit))
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































