





























115
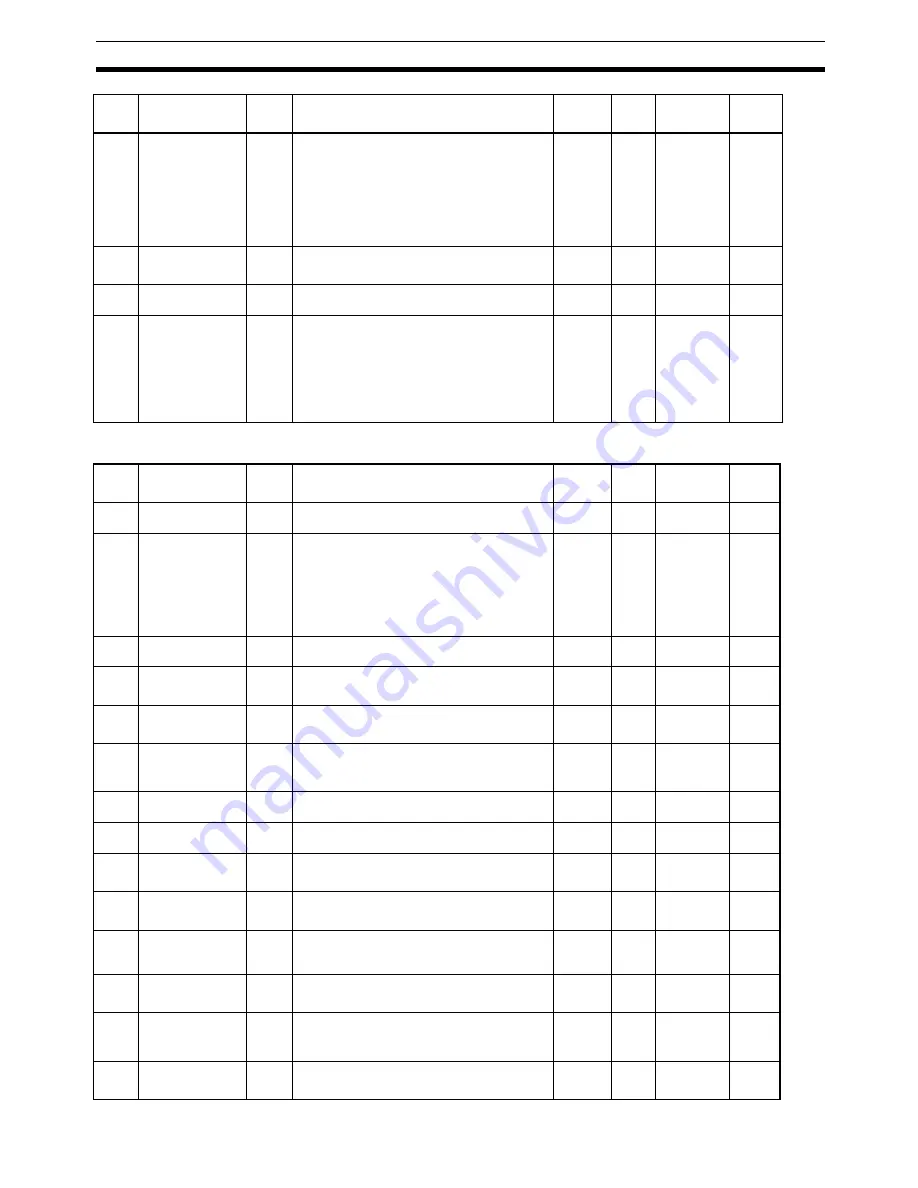
Servo Parameter Area
Section 4-5
Special Parameters 3
704
(704)
Backlash Compen-
sation Selection
2
Select to enable or disable the backlash compensation
during position control.
Set the compensation direction when the compensa-
tion is enabled.
0: Disable the backlash compensation.
1: Compensate the backlash at the first forward oper-
ation after a Servo ON.
2: Compensate the backlash at the first reverse oper-
ation after a Servo ON.
0
-
0 to 2
C
705
(705)
Backlash Compen-
sation Amount
2
Set the backlash compensation amount during posi-
tion control.
0
Com-
mand
unit
-32768 to
32767
B
706
(706)
Backlash Compen-
sation Time Constant
2
Set the time constant to apply a backlash compensa-
tion during position control.
0
0.01ms 0 to 6400
B
710
(70A)
MECHATROLINK-II
Communication I/O
Monitor Setting
2
Select whether to reflect the inputs to the I/O monitor
of MECHATROLINK-II communications, when either
the forward or reverse drive prohibition input is
assigned to the input signal and the Drive Prohibition
Input Selection (Pn504) is set to 1 (i.e. Disable).
0: Disable the one on the I/O monitor of MECHA-
TROLINK-II communications as well.
1: Enable the one on the I/O monitor of MECHA-
TROLINK-II communications.
0
-
0 to 1
A
Param-
eter
No.
Parameter name
Param-
eter
size
Explanation
Default
setting
Unit
Setting
range
Data
attribute
Param-
eter
No.
Parameter name
Param-
eter
size
Explanation
Default
setting
Unit
Setting
range
Data
attribute
800
(800)
Communications
Control
2
Controls the alarms and warnings over the MECHA-
TROLINK-II communications.
0
-
-32768 to
32767
C
801
(801)
Soft Limit
2
Select whether to enable or disable the Soft Limit
Function.
0: Enable the soft limits on both directions.
1: Disable the forward soft limit, but enable the
reverse soft limit.
2: Enable the forward soft limit, but disable the reverse
soft limit.
3: Disable the soft limits on both directions.
0
-
0 to 3
A
803
(803)
Origin Range
2
Set the threshold for detecting the origin in absolute
values.
0
-
0 to 250
A
804
(804)
Forward Software
Limit Value
4
Set the forward soft limit.
500000
Com-
mand
unit
-1073741823
to
1073741823
A
806
(806)
Reverse Software
Limit
4
Set the reverse soft limit.
-500000
Com-
mand
unit
-1073741823
to
1073741823
A
808
(808)
Absolute Encoder
Origin Offset
4
Set the offset volume between the encoder or external
encoder position and the mechanical coordinate posi-
tion, when an absolute encoder or an absolute exter-
nal encoder is used.
0
Com-
mand
unit
-1073741823
to
1073741823
C
811
(80B)
Linear Acceleration
Constant
2
Set the acceleration for positioning.
100
*1
-32768 to
32767
B
814
(80E)
Linear Deceleration
Constant
2
Set the deceleration for positioning.
100
*1
-32768 to
32767
B
818
(812)
Position Command
FIR Filter Time Con-
stant
2
Set the time constant of FIR filter for the position com-
mand.
0
0.1ms
0 to 10000
B
820
(814)
Final Distance for
External Input Posi-
tioning
4
Sets the distance to travel after the latch signal input
position is detected during the external input position-
ing.
100
0.1ms
-1073741823
to
1073741823
B
822
(816)
Origin Return mode
Setting
2
Set the direction for origin return.
0: Positive direction
1: Negative direction
0
-
0 to 1
B
823
(817)
Origin Return
Approach Speed 1
2
Set the operating speed for origin returns, from when
the origin proximity signal turns on to when it turns off
and the latch signal is detected.
50
*2
1 to 32767
B
824
(818)
Origin Return
Approach Speed 2
2
Set the operating speed for origin returns, from when
the latch signal is detected to when the motor stops at
the position after travelling the distance set by Final
Distance for Origin Return (Pn825).
5
*2
1 to 32767
B
825
(819)
Final Distance for
Origin Return
4
Set the distance from the position where the latch sig-
nal is entered to the origin during origin returns.
100
Com-
mand
unit
-1073741823
to
1073741823
B
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































