





























548
List of Parameters
Appendix B
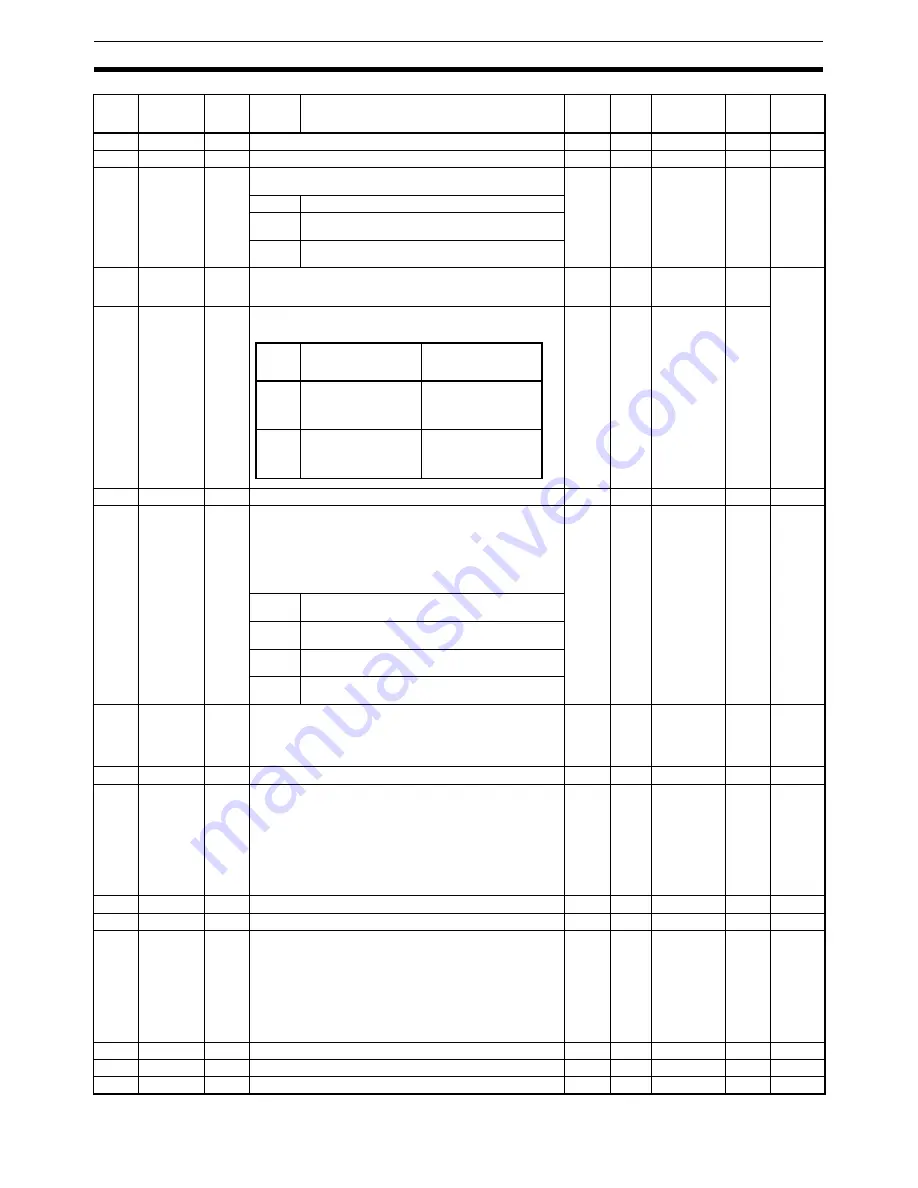
Pn07E
Reserved
---
Do not change.
0
---
---
---
Pn07F
Reserved
---
Do not change.
0
---
---
---
Pn100
Backlash
Compensa-
tion Selec-
tion
2
Enables or disables the backlash compensation for position con-
trol, and sets the compensation direction.
0
---
0 to 2
Offline
0
Disabled
1
Compensates in the initial positive direction after the
Servo ON.
2
Compensates in the initial negative direction after the
Servo ON.
Pn101
Backlash
Compensa-
tion
2
Sets the backlash compensation amount for position control.
0
Com-
mand
units
−
32768 to
32767
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn102
Backlash
Compensa-
tion
Time Con-
stant
2
Sets the backlash compensation time constant for position
control.
0
0.01
ms
0 to 6400
Online
Pn103
Reserved
---
Do not change.
0
---
---
---
Pn104
Soft Limit
2
Enables or disables the soft limit.
When enabled, the soft limit values are set in Forward Software
Limit (Pn201) and Reverse Software Limit (Pn202).
Note
The response value for limit signals disabled by this set-
ting will be set to 0. The response value for limit signals is
also set to 0 when the Servomotor does not complete its
return to origin.
0
---
0 to 3
Online
0
Enable both the Forward / Reverse Software Limits
(Pn201 and Pn202)
1
Disable the Forward Software Limit (Pn201), enable the
Reverse Software Limit (Pn202)
2
Enable the Forward Software Limit (Pn201), disable the
Reverse Software Limit (Pn202)
3
Disable both the Forward / Reverse Software Limits
(Pn201 and Pn202)
Pn105
Origin
Range
2
Sets the threshold for detecting the origin (ZPOINT) in absolute
values.
ZPOINT = 1 when the return to origin completes (coordinate sys-
tem setup is complete) and the feedback position is within the set-
ting range of this parameter.
10
Com-
mand
units
0 to 250
Online
Pn106
Reserved
---
Do not change.
0
---
---
---
Pn107
Linear
Accelera-
tion
Constant
2
Sets the acceleration for positioning operations.
A setting of "0" is regarded as "1".
The setting will be handled after conversion to an unsigned 16-bit
data (0 to 65535).
Example:
−
32768
→
8000h = 32768
−
1
→
FFFFh = 65535
100
×
10000
[com-
mand
units/
s
2
]
−
32768 to
32767
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn108
Reserved
---
Do not change.
0
---
---
---
Pn109
Reserved
---
Do not change.
0
---
---
---
Pn10A
Linear
Decelera-
tion Con-
stant
2
Sets the deceleration for positioning operations.
A setting of "0" is regarded as "1".
The setting will be handled after conversion to an unsigned 16-bit
data (0 to 65535).
Example:
−
32768
→
8000h = 32768
−
1
→
FFFFh = 65535
100
×
10000
[com-
mand
units/
s
2
]
−
32768 to
32767
Online
Settings
can be
changed
when the
axes are
stopped
(Busy
Flag for
each axis
= 0).
Pn10B
Reserved
---
Do not change.
0
---
---
---
Pn10C
Reserved
---
Do not change.
0
---
---
---
Pn10D
Reserved
---
Do not change.
0
---
---
---
Param-
eter
No.
Parameter
name
Param-
eter
size
Setting
Explanation
Default
setting
Unit
Setting
range
Enable
setting
Details
Value
of
Pn100
Pn101 = Positive
number
Pn101 = Negative
number
1
Compensates in posi-
tive direction during
rotation in positive
direction
Compensates in nega-
tive direction during
rotation in positive
direction
2
Compensates in posi-
tive direction during
rotation in negative
direction
Compensates in nega-
tive direction during
rotation in negative
direction
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































