





























158
Servo Parameter Area
Section 4-5
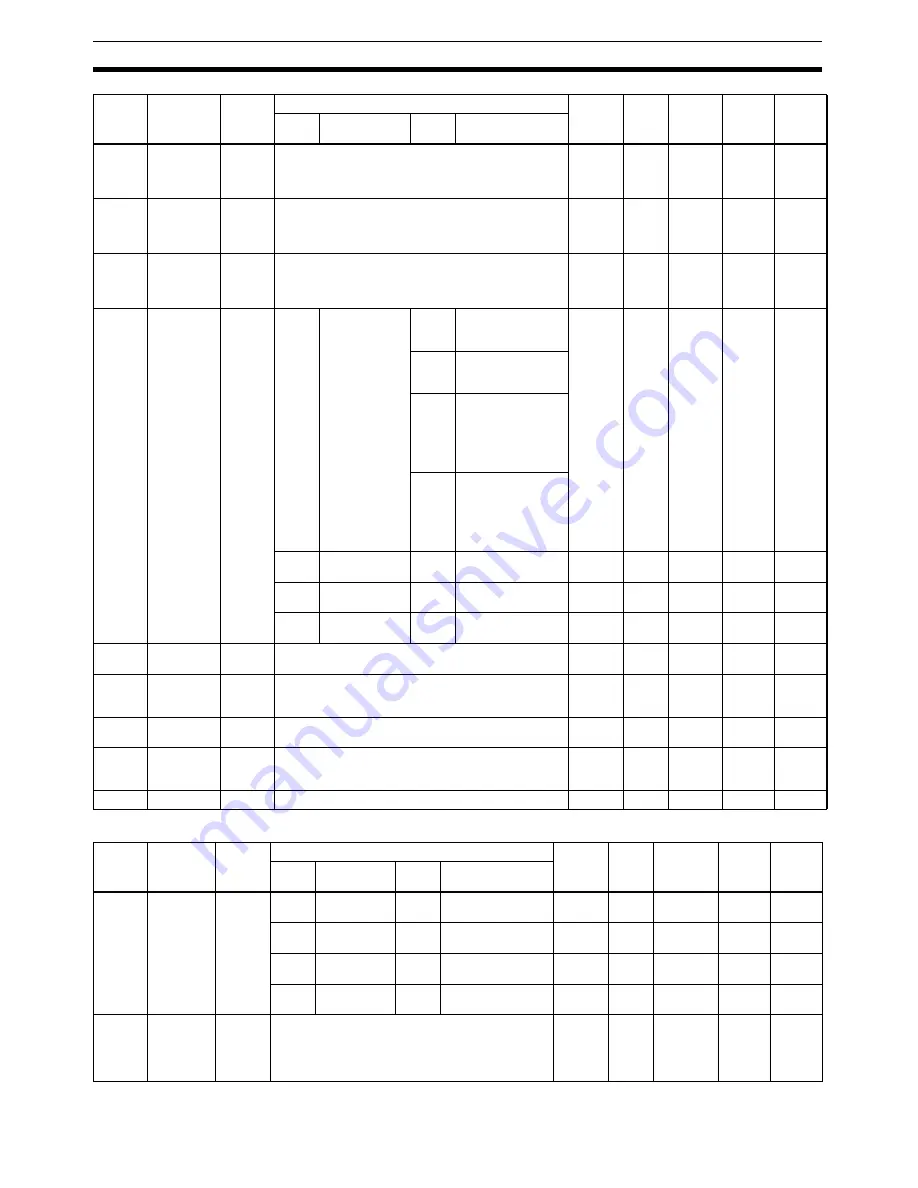
Position Control Parameters
Pn1A2
Speed
feedback
filter time
constant
2
Sets the filter time constant for No. 1 gain speed feed-
back.
72
×
0.01
ms
30 to
3200
Online
---
Pn1A3
Speed
feedback
filter time
constant 2
2
Sets the filter time constant for No. 2 gain speed feed-
back.
72
×
0.01
ms
30 to
3200
Online
---
Pn1A4
Torque
command
filter time
constant 2
2
Sets the filter time constant for the torque command.
36
×
0.01
ms
0 to
2500
Online
---
Pn1A7
Utility con-
trol
switches
2
0
Integral com-
pensation pro-
cessing
0
Integral compensa-
tion processing not
executed.
1
---
---
Online
---
1
Integral compensa-
tion processing
executed.
2
Integral compensa-
tion is executed for
No. 1 gain and not
for No. 2 gain for
less-deviation gain
switching.
3
Integral compensa-
tion is executed for
No. 2 gain and not
for No. 1 gain for
less-deviation gain
switching.
1
Not used.
2
(Do not change the
setting.)
2
---
---
---
---
2
Not used.
1
(Do not change the
setting.)
1
---
---
---
---
3
Not used.
1
(Do not change the
setting.)
1
---
---
---
---
Pn1A9
Utility inte-
gral gain
2
Adjusts the auxiliary integral responsive.
37
Hz
0 to 500 Online
---
Pn1AA
Position
propor-
tional gain
2
Adjusts the position proportional responsive.
60
Hz
0 to 500 Online
---
Pn1AB
Speed inte-
gral gain
2
Adjusts the speed integral responsive.
0
Hz
0 to 500 Online
---
Pn1AC
Speed pro-
portional
gain
2
Adjusts the speed proportional responsive.
120
Hz
0 to
2000
Online
---
Pn1B5
Not used.
---
(Do not change the setting.)
150
---
---
---
---
Param-
eter No.
Parame-
ter name
Param-
eter
size
Contents
Default
setting
Unit
Setting
range
Enable
setting
Details
Digit
No.
Name
Set-
ting
Explanation
Pn200
Not used.
2
0
Not used.
0
(Do not change the
setting.)
0
---
---
---
---
1
Not used.
0
(Do not change the
setting.)
0
---
---
---
---
2
Not used.
1
(Do not change the
setting.)
1
---
---
---
---
3
Not used.
0
(Do not change the
setting.)
0
---
---
---
---
Pn205
Absolute
encoder
multi-turn
limit set-
ting
2
Sets the multi-turn limit for when a Servomotor with
an absolute encoder is used.
65535
Rota-
tion
0 to 65535 Offline
---
Param-
eter No.
Parameter
name
Param-
eter
size
Contents
Default
setting
Unit
Setting
range
Enable
setting
Details
Digit
No.
Name
Set-
ting
Explanation
Summary of Contents for CJ1W-NC271 - 12-2009
Page 2: ......
Page 4: ...iv ...
Page 6: ...vi ...
Page 22: ...xxii ...
Page 58: ...30 Starting Operation Section 2 2 ...
Page 244: ...216 Axis Operating Input Memory Areas Section 4 8 ...
Page 264: ...236 Transferring Servo Parameters Section 5 3 ...
Page 396: ...368 Linear Interpolation Section 9 7 ...
Page 648: ...620 List of Error Codes Appendix D ...
Page 674: ...646 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Page 684: ...656 Index ...
Page 686: ...658 Revision History ...







































































