





























4
1
2
3
5
6
7
8
9
10
6-14
Chapter 6 PARALLEL I/O INTERFACE
Chapter 6 PARALLEL I/O INTERFACE
6-15
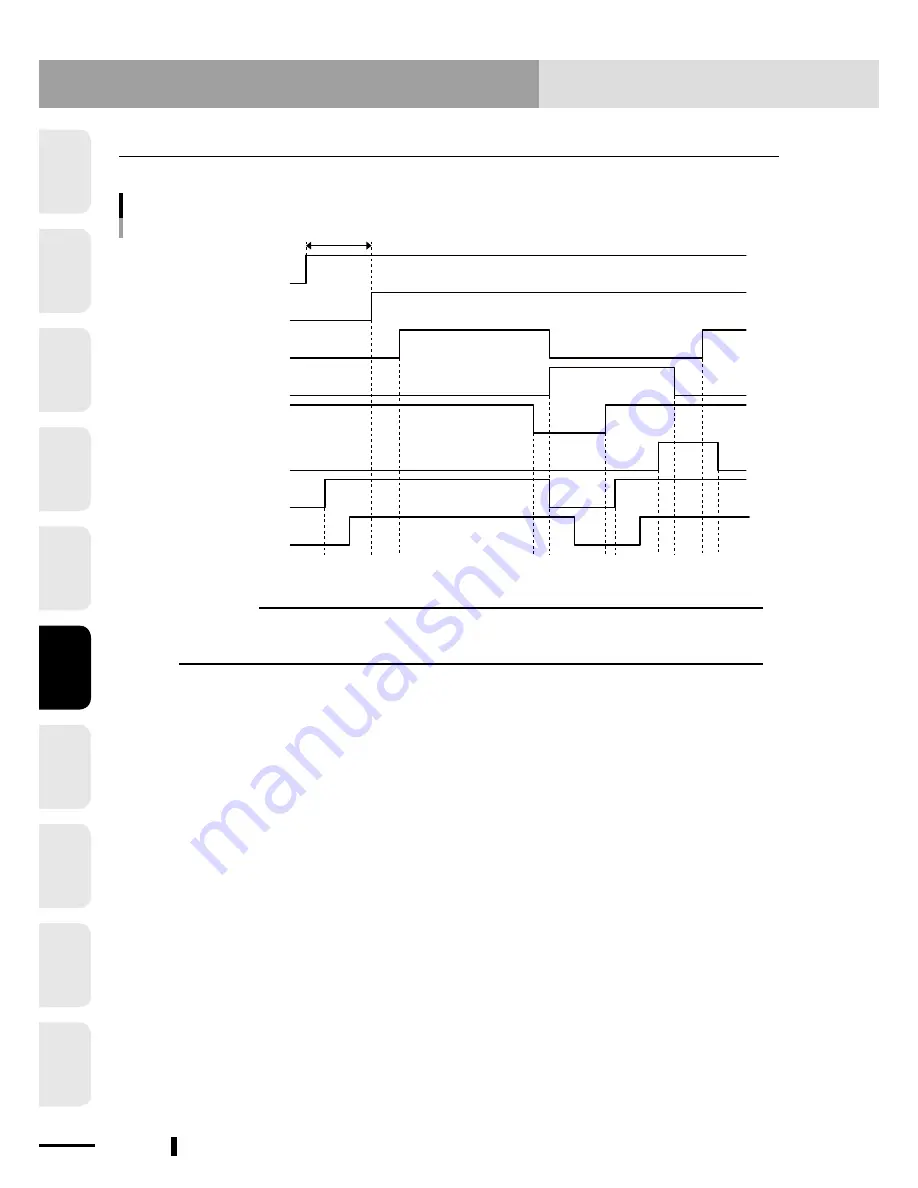
1.8 Dedicated I/O signal timing chart
1.8.1
Controller power ON, servo ON and emergency stop
a)
a’)
b)
c) d)
e) f)
g) h)
i) j)
CPU_OK
DO01a
Control power
Approx. 3 sec.
Servo ON output
DO02a
Alarm
DO03a
Emergency stop
Servo ON input
DI01
MP READY *
(SAFETY connector)
Main power
on
off
on
off
on
off
on
off
on
off
on
off
Controller power ON, servo ON and emergency stop
*For details on MP READY signal, refer to Chapter 7, "SAFETY I/O INTERFACE".
c
CAUTION
It will take about 3 seconds for the controller to issue the CPU_OK output after the
power is turned on.
Initial servo-on processing when power is turned on.
a) MP READY output turns on. (Main power supply turns on after MP READY output turns on.)
a') CPU_OK output turns on.
b) When not in emergency stop, servo ON output turns on after servo ON processing.
Shifting to emergency stop
c) Emergency stop input turns off.
d) Alarm output turns on and servo ON output turns off, MP READY turns off.
Shifting from emergency stop to servo-on
e) Emergency stop input turns on.
f) Emergency stop input turns on, MP READY turns on.
g) Servo ON input turns on.
h) Alarm output turns off.
i) Servo ON output turns on.
j) Servo ON input turns off after checking for servo ON output.
* If the emergency stop input contacts are open or a major error occurs when the controller power
is turned on, the servo remains off. Likewise, if the “Servo on when power on” parameter is set
to “INVALID”, or SAFE mode or serial I/O setting is enabled, the controller starts up with the
servo turned off.
* When processing with dedicated inputs, use I/O signals to perform handshake processing. If
handshake processing is impossible, hold the signal for a minimum of 100ms.
* Supply motor power immediately when "MP READY" is turned on.
1. Standard I/O interface overview
Summary of Contents for RCX240
Page 1: ...RCX240 EUR6127206 E107 Ver 2 06 Userʼs Manual YAMAHA 4 AXIS ROBOT CONTROLLER ...
Page 2: ......
Page 18: ......
Page 34: ......
Page 78: ......
Page 402: ......
Page 448: ...5 46 Chapter 5 TWO ROBOT SETTING MEMO ...
Page 450: ......
Page 480: ...6 30 Chapter 6 PARALLEL I O INTERFACE MEMO ...
Page 482: ......
Page 494: ......
Page 506: ......
Page 512: ......
Page 522: ......
Page 611: ...INDEX ...
Page 612: ......
Page 617: ......
Page 619: ......







































































