





























4
1
2
3
5
6
7
8
9
10
5-28
Chapter 5 TWO-ROBOT SETTING
Chapter 5 TWO-ROBOT SETTING
5-29
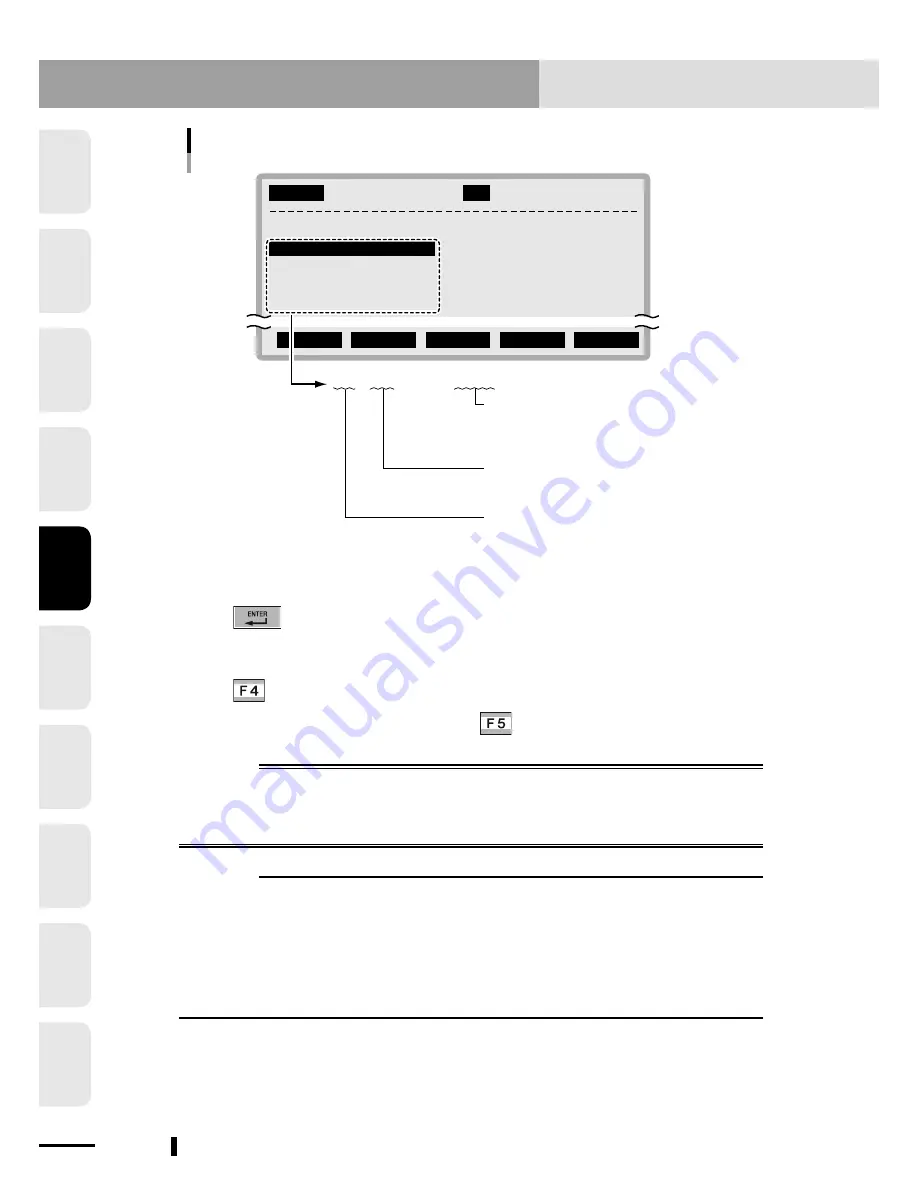
MANUAL
>RST.ABS
50
/ 50%[MG][S0H0J]
Align axes with MARK,& Press ENTER.
M1= NG / 61%
M2= NG / TORQUE
S1= OK / TORQUE
S2= OK / TORQUE
ADJ.+ ADJ.ー VEL+ VELー
M1= NG / 61%
Machine reference (%)
Axes:
M? ...Main robot axes
S? ...Sub robot axes
m? ...Main auxiliary axes
s? ...Sub auxiliary axes
Absolute reset statuses:
OK ...Return-to-origin complete status
NG ...Origin incomplete status
* The return-to-origin method displays
for axes where a method other than
the mark method is in effect.
Absolute reset on each axis (Mark method)
3
Press
.
A confirmation message then appears on the guideline.
4
Press
(YES) to perform absolute reset.
To abort the absolute reset operation, press
(NO).
w
WARNING
SLIGHT ROBOT MOTION OCCURS WHEN AN ABSOLUTE RESET IS PERFORMED IN A
"SERVO ON" CONDITION. TO ENSURE SAFETY, BE SURE TO STAY OUT OF THE ROBOT
MOTION RANGE AT THIS TIME.
c
CAUTION
An error message, "17.91:D?.Cannot perform ABS.reset" appears if the machine
reference is not within a range of 44 to 56%. The absolute reset operation then
terminates as an error.
If the robot controller is in origin incomplete due to some kind of problem perform
absolute reset on the axis which was unable to return to origin. After absolute reset,
always check if the axis can move to the same position as before origin incomplete.
2. Operations and data when using the two-robot setting
Summary of Contents for RCX240
Page 1: ...RCX240 EUR6127206 E107 Ver 2 06 Userʼs Manual YAMAHA 4 AXIS ROBOT CONTROLLER ...
Page 2: ......
Page 18: ......
Page 34: ......
Page 78: ......
Page 402: ......
Page 448: ...5 46 Chapter 5 TWO ROBOT SETTING MEMO ...
Page 450: ......
Page 480: ...6 30 Chapter 6 PARALLEL I O INTERFACE MEMO ...
Page 482: ......
Page 494: ......
Page 506: ......
Page 512: ......
Page 522: ......
Page 611: ...INDEX ...
Page 612: ......
Page 617: ......
Page 619: ......







































































