





























4-86
Chapter 4 OPERATION
4
1
2
3
5
6
7
8
9
10
Chapter 4 OPERATION
4-87
11. "MANUAL" mode
i
Current position
This shows the current position of the robot. When an "M" or "S" letter is followed by a number
it indicates the position in "pulse" units (integer display) and when an "x" to "a" letter follows,
it indicates "mm" units (decimal point display). When an asterisk (*) appears at the left of the
"M" and "S" letters, it indicates the origin sensor is on. An asterisk also appears when no origin
sensor is used.
An "M" letter means the main robot axis, and an "S" letter means the sub robot axis. When
auxiliary axes are specified, the lower-case letters "m" and "s" appear instead of upper-case
letters.
o
Guideline
The contents assigned to function keys are shown highlighted. A message on what to do next
also appears here in some operation steps.
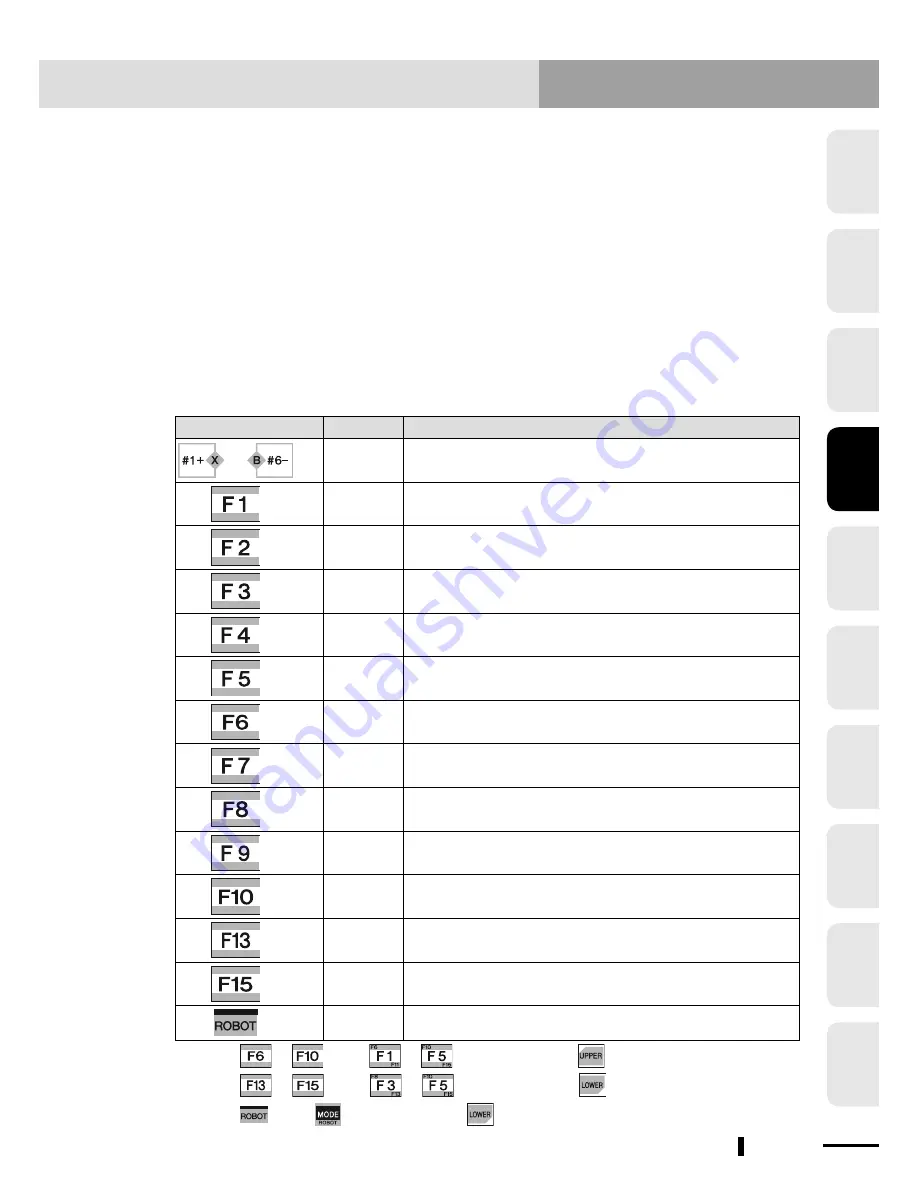
Valid keys and submenu descriptions in "MANUAL" mode are shown below.
Valid keys
Menu
Function
to
Moves the robot manually.
POINT
Switches to the point data processing screen.
PALLET
Switches to the pallet data processing screen.
ORIGIN
Performs return-to-origin.
VEL+
Increases manual movement speed for the selected
robot group in steps.(1
→
5
→
20
→
50
→
100 %)
VEL-
Decreases automatic movement speed for the selected
robot group in steps.(100
→
50
→
20
→
5
→
1 %)
*1
SHIFT
Switches to the shift data processing screen.
*1
HAND
Switches to the hand data processing screen.
*1
UNITCHG
Changes the current position display units to "mm" or
"pulse".
*1
VEL++
Increases manual movement speed for the selected
robot group in 1% increments.
*1
VEL--
Decreases manual movement speed for the selected
robot group in 1% decrements.
*2
RST.ABS
Resets the absolute position sensor.
*2
COORDI
Sets the standard coordinates.
*3
Switches the robot group.
*1: To use
to
, press
to
while holding down
.
*2: To use
or
, press
or
while holding down
.
*3: To use
, press
while holding down
.
Summary of Contents for RCX240
Page 1: ...RCX240 EUR6127206 E107 Ver 2 06 Userʼs Manual YAMAHA 4 AXIS ROBOT CONTROLLER ...
Page 2: ......
Page 18: ......
Page 34: ......
Page 78: ......
Page 402: ......
Page 448: ...5 46 Chapter 5 TWO ROBOT SETTING MEMO ...
Page 450: ......
Page 480: ...6 30 Chapter 6 PARALLEL I O INTERFACE MEMO ...
Page 482: ......
Page 494: ......
Page 506: ......
Page 512: ......
Page 522: ......
Page 611: ...INDEX ...
Page 612: ......
Page 617: ......
Page 619: ......







































































