





























Part 2: Review on Replacement of MR-J2S-_A_ with MR-J4-_A_
2 - 23
MR-J2S-_A_
MR-J4-_A_
Control
mode
No.
Name and function
Initial
value
No.
Name and function
Initial
value
8
Internal speed command 1
This is used to set speed 1 of internal speed commands.
100
PC05 Internal speed command 1
This is used to set speed 1 of internal speed
commands.
Set the same value as for MR-J2S-_A_.
100 S
Internal speed limit 1
This is used to set speed 1 of internal speed limits.
Internal speed limit 1
This is used to set speed 1 of internal speed limits.
Set the same value as for MR-J2S-_A_.
T
9
Internal speed command 2
This is used to set speed 2 of internal speed commands.
500
PC06 Internal speed command 2
This is used to set speed 2 of internal speed
commands.
Set the same value as for MR-J2S-_A_.
500 S
Internal speed limit 2
This is used to set speed 2 of internal speed limits.
Internal speed limit 2
This is used to set speed 2 of internal speed limits.
Set the same value as for MR-J2S-_A_.
T
10 Internal speed command 3
This is used to set speed 3 of internal speed commands.
1000
PC07 Internal speed command 3
This is used to set speed 3 of internal speed
commands.
Set the same value as for MR-J2S-_A_.
1000 S
Internal speed limit 3
This is used to set speed 3 of internal speed limits.
Internal speed limit 3
This is used to set speed 3 of internal speed limits.
Set the same value as for MR-J2S-_A_.
T
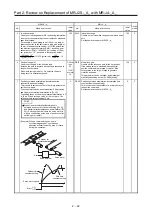
11 Speed acceleration time constant
Used to set the acceleration time required to reach the
rated speed from 0 r/min in response to an analog speed
command and internal speed commands 1 to 7.
For example, for a servo motor with a rated speed of
3000 r/min, set 3000 (3 s) to increase the speed from 0
to 1000 r/min in 1 s.
0
PC01 Speed acceleration time constant
Used to set the acceleration time required to reach
the rated speed from 0 r/min in response to VC
(analog speed command) and internal speed
commands 1 to 7 ([Pr. PC05] to [Pr. PC11]).
Set the same value as for MR-J2S-_A_.
0 S
T
12 Speed deceleration time constant
Used to set the deceleration time required to reach 0
r/min from the rated speed in response to an analog
speed command and internal speed commands 1 to 7.
0
PC02 Speed deceleration time constant
Used to set the deceleration time required to reach 0
r/min from the rated speed in response to VC
(analog speed command) and internal speed
commands 1 to 7 ([Pr. PC05] to [Pr. PC11]).
Set the same value as for MR-J2S-_A_.
0 S
T
0 r/min
Rated
speed
Speed
Setting value of
parameter No.11
Setting value of
parameter No.12
If the preset speed
command is lower than the
rated speed,
acceleration/deceleration
time will be shorter.
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...







































































