





























Part 2: Review on Replacement of MR-J2S-_A_ with MR-J4-_A_
2 - 30
MR-J2S-_A_
MR-J4-_A_
Control
mode
No.
Name and function
Initial
value
No.
Name and function
Initial
value
26 Analog torque command maximum output
Used to set the output torque at an analog torque
command voltage (TC = ±8 V) of +8 V assuming that the
maximum torque is 100[%].
For example, when the setting value is 50 and TC = +8 V,
Maximum torque ×
is output.
100
PC13 Analog torque command maximum output
Set the same value as for MR-J2S-_A_.
100.0 T
27 Encoder
output
pulses
Used to set the encoder pulses (A-phase and B-phase)
output by the servo amplifier. Set the value 4 times
greater than the A-phase and B-phase pulses.
[Pr. 54] can be used to choose the output pulse setting or
output dividing ratio setting.
The number of A-phase and B-phase pulses actually
output is 1/4 times greater than the preset number of
pulses.
The maximum output frequency is 1.3 Mpulses/s (after
multiplication by 4). Use this parameter within this range.
For output pulse designation
Set [Pr. 54] to "0 _ _ _" (initial value).
Set the number of pulses per servo motor revolution.
Output pulse = setting value [pulse/rev].
For instance, when "5600" is set, the actual output A-
and B-phase pulses are as follows.
A-phase/B-phase output pulse =
5600
4
= 1400 [pulse]
For output division ratio setting
Set [Pr. 54] to "1 _ _ _".
The number of pulses per servo motor revolution is
divided by the set value.
Output pulse =
Resolving power of
one rotation of servo motor
4
[pulse/rev]
For instance, when "8" is set, the actual output A- and
B-phase pulses are as follows.
A-phase/B-phase
output pulse
131072
8
1
4
= 4096 [pulse]
=
4000 PA15 Encoder
output
pulse
Used to set the encoder pulses (A-phase and B-
phase) output by the servo amplifier.
Refer to the comparison table below for the setting
method.
・
In this parameter, set the value of “N × 32".
4000 P
S
T
PC19 Encoder output pulse selection
Refer to
the comparison table above for the setting
method.
0000h
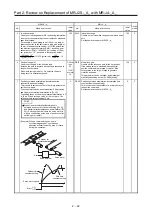
28 Internal torque limit 1
Set the parameter assuming that the maximum torque is
100 [%]. The parameter is for limiting the torque of the
servo motor.
When "0" is set, no torque is generated.
(Note) TL
Torque limit
0
Internal torque limit 1 (Parameter No.28)
1
Analog torque limit < Internal torque limit 1
: Analog torque limit
Analog torque limit > Internal torque limit 1
: Internal torque limit 1
Note. 0: OFF
1: ON
When torque is output in analog monitor output, this
setting value will be the maximum output voltage (+8 V).
100
PA11 Forward rotation torque limit
You can limit the torque generated by the servo
motor.
Set the same value as for MR-J2S-_A_.
100.0 P
S
T
PA12 Reverse rotation torque limit
You can limit the torque generated by the servo
motor.
Set the same value as for MR-J2S-_A_.
100.0
100
50
Encoder output pulse setting comparison table
(1) For primary replacement (Note 1)
MR-J2S-_A_ MR-J4-_A_
No.54
No.27
(Note 2)
PC19
PA15
(Note 3)
1 _ _ _
N
→
0 _ 1 _
N
0 _ _ _
N
0 _ 0 _
N
Note 1. N = J2S setting value.
2. Set the same value as for J2S in MR-J4-
_A_ [Pr. PA15].
(2) For secondary/simultaneous replacement (Note 1)
MR-J2S-_A_ MR-J4-_A
No.54
No.27
(Note 2)
PC19 PA15
1 _ _ _
N
→
0 _1 _
N × 32
(Note 3)
0 _ _ _
N
0 _0 _
N
Note 1. For the primary, secondary and simultaneous
replacement, refer to "[Appendix 2] Introduction
to Renewal Tool".
2. N = J2S setting value.
3. For dividing ratio settings, set a value 32 x
the MR-J2S-_A_ setting value for
MR-J4-_A_ [Pr. PA15].
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...