




























Part 2: Review on Replacement of MR-J2S-_A_ with MR-J4-_A_
2 - 22
MR-J2S-_A_
MR-J4-_A_
Control
mode
No.
Name and function
Initial
value
No.
Name and function
Initial
value
5 In-position
range
Used to set the range where INP (positioning completion)
is output by the command pulse unit before an electronic
gear is calculated.
For example, when wanting to set 100
μ
m in a state of
direct connection to the ball screw, a lead wire length of
10 mm, a feedback pulse number of 131072 pulses/rev,
and electronic gear numerator (CMX) / electronic gear
denominator (CDV) = 16384/125 (unit setting of 10
μ
m
per pulse), set "10", as shown in the equation below.
100 [µm] × 10
-6
10 [mm] × 10
-3
× 131072 [pulse/rev] ×
125
16384
≒
10
100 PA10
In-position
range
Used to set an in-position range per command pulse
unit.
Set the same value as for MR-J2S-_A_.
100 P
6
Position loop gain 1
Used to set the gain of the position loop.
Increase the gain to improve track ability in response to
the position command.
When auto tuning mode 1 or 2 is selected, the auto
tuning result is automatically used.
7 kW or
less:
35
11 kW
or more:
19
PB07 Model loop gain
Used to set the response gain till the set position.
If the setting value is increased, traceability for
position command is improved. However, if the
setting value is too large, it tends to generate
vibration and noise.
This parameter can be set either automatically or
manually depending on the [Pr. PA08] setting.
15.0 P
7
Position command acceleration/deceleration time
constant (Position smoothing)
This is used to set the constant of a primary delay to the
position command.
The control method can be selected from Primary delay
and Linear acceleration/deceleration in [Pr. 55].
The setting range of Linear acceleration/deceleration is 0
to 10 ms. When setting a value of 10 ms or more, the
setting value is recognized as 10 ms.
POINT
When Linear acceleration/deceleration is
selected, do not select Control switching ([Pr. 0])
and Restart after instantaneous power failure ([Pr.
20]). Selecting them will cause the servo motor to
make a sudden stop at the time of position control
switching or at restart.
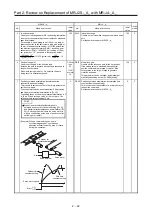
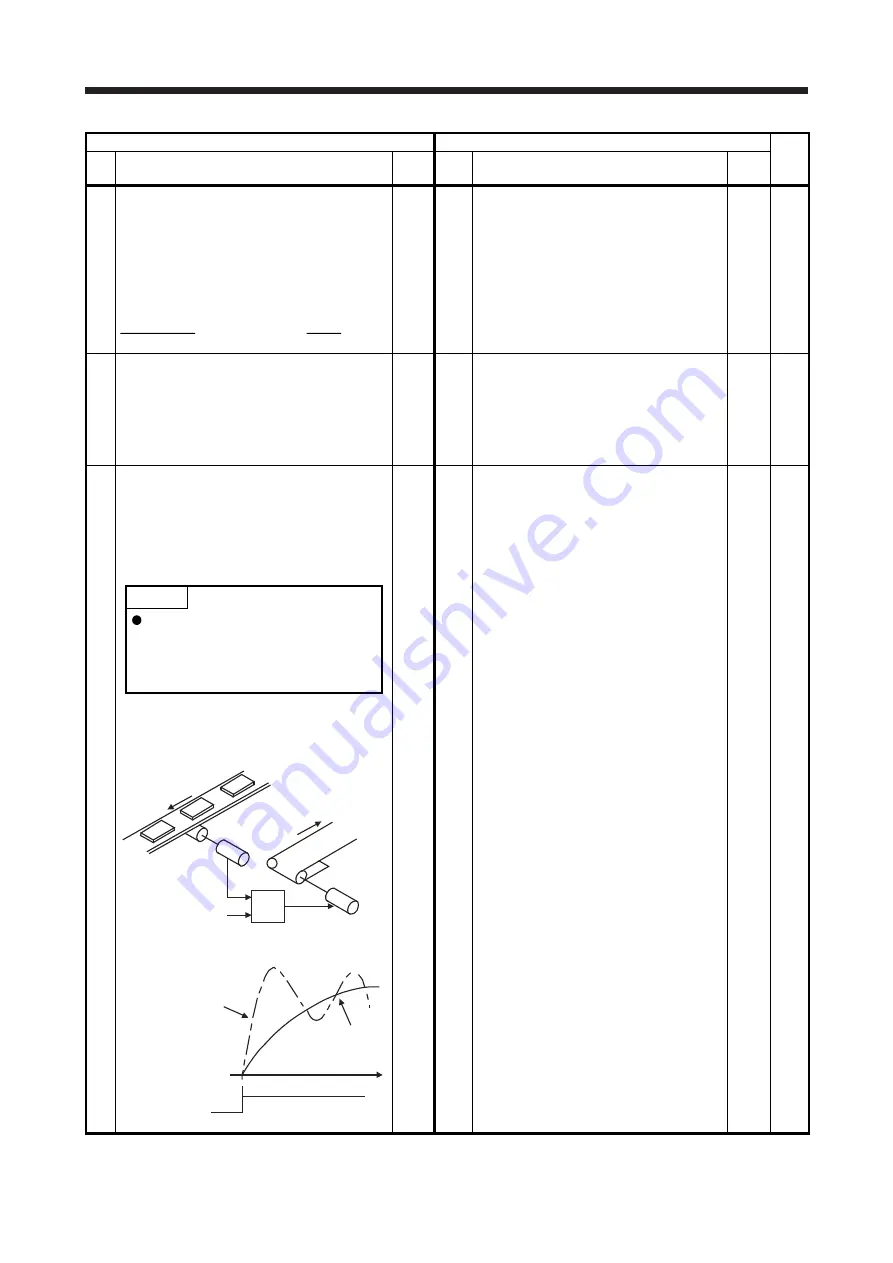
(Example) When a command is given from a
synchronizing encoder, synchronous
operation will start smoothly even if it starts
during line operation.
3
PB03 Position command acceleration/deceleration time
constant (Position smoothing)
This is used to set the constant of a primary delay to
the position command.
Set the same value as for MR-J2S-_A_.
0 P
t
ON
OFF
Encoder for
synchronization
Start
Servo amplifier
Servo motor
Without time
constant setting
With time
constant setting
Servo motor speed
Start
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...






































































