
























Part 6: Review on Replacement of MR-J2M with MR-J4
6 - 9
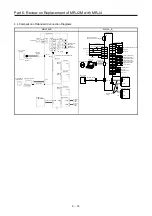
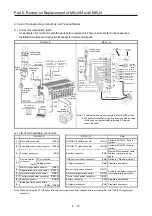
(2) Drive unit MR-J2M-_DU
MR-J2M-A
(Drive unit MR-J2M-_DU)
MR-J4-_A_
Note
No. Name No.
Name
1
Absolute position detection system
PA03
Absolute position detection
system
2 Auto
Tuning
PA09 Auto
tuning
response
The setting value must be changed based on machine
resonance frequency.
PA08 Auto
tuning
mode
The setting value needs to be changed according to the
auto tuning mode. Some of the settings cannot be set.
<Gain adjustment mode correspondence table>
MR-J2M-A MR-J4-_A_
Interpolation mode
2 gain adjustment mode 1
Auto tuning mode 1
Auto tuning mode 1
Auto tuning mode 2
Auto tuning mode 2
Manual
mode 1
Manual
mode 2
Manual
mode
3
Electronic gear numerator
PA06 Electronic gear numerator
The setting value must be changed according to resolution
and detection capability.
4
Electronic gear denominator
PA07 Electronic gear denominator
5
In-position range
PA10 In-position range
Set it per command input pulse before electronic gear
conversion for both MR-J2M-A and MR-J4-_A_.
6
Position loop gain 1.
PB07 Model loop gain
The unit system is different. (rad/s
→
0.1 rad/s)
7
Position command
acceleration/deceleration time constant
PB03
Position command
acceleration/deceleration time
constant
16
Alarm history clear
PC18 Alarm history clear
19
DRU parameter writing inhibit
PA19 Parameter writing inhibit
Change the setting value as necessary.
20
Slight vibration suppression control
PB24
Slight vibration suppression
control
Encoder cable communication method
selection
PC22
Encoder cable communication
method selection
21
Function selection 3 (command pulse
selection)
PA13 Command pulse input form
22
Stop method selection when LSP/LSN is
valid
PD30
Stop method selection when
LSP/LSN is valid
23
Feed forward gain
PB04 Feed forward gain
24
Zero speed
PC17 Zero speed
27
Encoder output pulses
PA15 Encoder output pulse
Max. output frequency is different.
28
Internal torque limit 1
PA11 Forward rotation torque limit
PA12 Reverse rotation torque limit
33
Electromagnetic brake sequence output
PC16
Electromagnetic brake
sequence output
34
Load to motor inertia ratio
PB06 Load to motor inertia ratio
The unit system is different.
(0.1-fold
→
0.01-fold)
Pay attention to the setting value.
35
Position loop gain 2.
PB08 Position loop gain
36
Speed loop gain 1.
No corresponding parameter (Setting not required)
37
Speed loop gain 2.
PB09 Speed loop gain
38
Speed integral compensation.
PB10 Speed integral compensation
The unit system is different. (ms
→
0.1 ms)
39
Speed differential compensation
PB11
Speed differential
compensation
42
Input signal selection 1
PD32 Clear (CR) selection
51
Operating method selection for RES
(Reset) shorting
PD30
Base circuit status selection
for RES on
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...







































































