




























Part 3: Review on Replacement of MR-J2S-_B_ with MR-J4-_B_
3 - 16
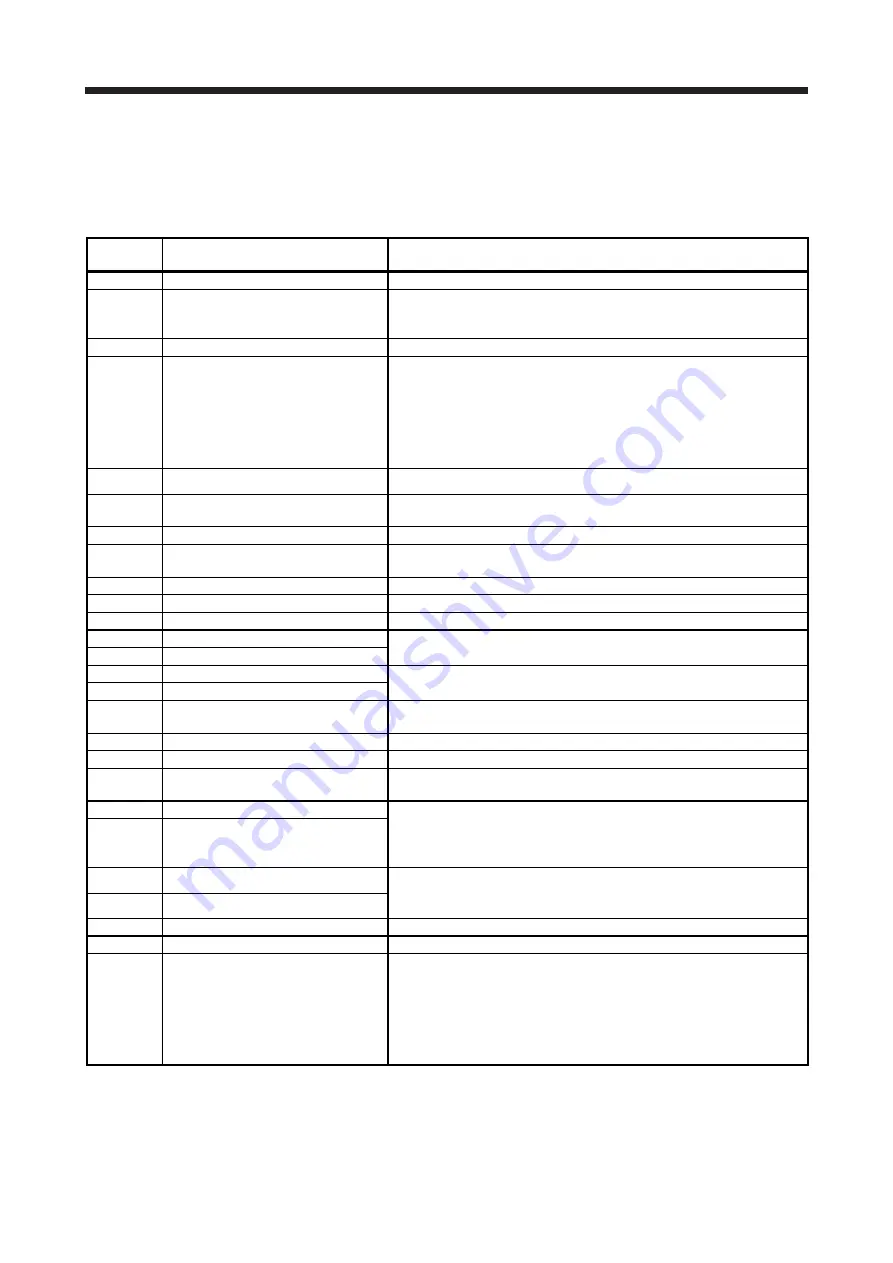
3.7.1 Setting requisite parameters upon replacement
The parameters shown in this section are a minimum number of parameters that need to be set for
simultaneous replacement. Depending on the settings of the currently used servo amplifier, parameters other
than these may need to be set.
Parameter
number
Name Precautions
PA02
Regenerative option selection
The setting must be changed according to option model.
PA04
Function selection A-1
Servo forced stop selection
Forced stop deceleration function selection
To configure the same settings as for MR-J2S-_B_, select "Forced stop
deceleration function disabled (with EM1 used)".
PA08
Gain adjustment mode selection
The setting value needs to be changed according to the auto tuning mode.
PA09
Auto tuning response
Auto tuning response setting
Refer to "3.7.3 Comparison of parameter details" for the setting value of this
parameter upon replacement.
It is necessary to make gain adjustment again when replacing.
For details on how to make gain adjustments, refer to Chapter 6 of the MR-
J4-_B_ Servo Amplifier Instruction Manual. The setting value needs be
changed based on the standard machine resonance frequency.
PA10
In-position range
The setting needs to be changed depending on the servo motor.
PA15
Encoder output pulse
Used to set the encoder pulses (A-phase and B-phase) output by the servo
amplifier.
PA19 Parameter
writing
inhibit
Change the setting value as necessary.
PB06
Load to motor inertia ratio
The unit system is different. (0.1-fold
→
0.01-fold) Pay attention to setting
value.
PB07
Model loop gain
The unit system is different. (rad/s
→
0.1 rad/s)
PB08
Position loop gain
The unit system is different. (rad/s
→
0.1 rad/s)
PB10
Speed integral compensation
The unit system is different. (ms
→
0.1 ms)
PB13
Machine resonance suppression filter 1
Change the setting value according to the frequency and depth.
PB14
Notch shape selection 1
PB15
Machine resonance suppression filter 2
Change the setting value according to the frequency and depth.
PB16
Notch shape selection 2
PB29
Load to motor inertia ratio after gain
switching
The unit system is different. (0.1-fold
→
0.01-fold) Pay attention to setting
value.
PB30
Position loop gain after gain switching
It is necessary to convert the ratio to a value to change the setting value.
PB31
Speed loop gain after gain switching
It is necessary to convert the ratio to a value to change the setting value.
PB32
Speed integral compensation after gain
switching
It is necessary to convert the ratio to a value to change the setting value.
PC01
Error excessive alarm level
The unit system is different.
MR-J2S-_B_: 0.025 rev. unit; MR-J4-_B_: 1/0.1/0.01/0.001 rev. unit
selectable
PC06
Function selection C-3
Error excessive alarm level unit
selection
PC09
Analog monitor 1 output
The setting value must be changed according to monitor output data.
"Maximum speed" and "Maximum torque" differ depending on the servo
motor. Set according to the servo motor.
PC10
Analog monitor 2 output
PC11
Analog monitor 1 offset
Depends on hardware. It is necessary to change the setting value.
PC12
Analog monitor 2 offset
Depends on hardware. It is necessary to change the setting value.
PD12
Function selection D-1
This is used to select enabled or disabled for the thermistor of the servo
motor.
: When using (HA-LFS series) servo motors that have thermal terminals and
not connecting thermal signals to the MR-J4 servo amplifier, set this
parameter to "1 _ _ _h (Disabled)".
The overheat protection of a servo motor is not enabled. Configure a
protective circuit.
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...






































































