





























Part 2: Review on Replacement of MR-J2S-_A_ with MR-J4-_A_
2 - 24
MR-J2S-_A_
MR-J4-_A_
Control
mode
No.
Name and function
Initial
value
No.
Name and function
Initial
value
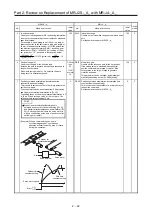
13 S-pattern acceleration/deceleration time constant
This is used to smooth start/stop of the servo motor.
Set the time of the arc part for S-pattern
acceleration/deceleration.
STA: Acceleration time constant ([Pr. 11])
STB: Deceleration time constant ([Pr. 12])
STC: S-pattern acceleration/deceleration time constant
([Pr. 13])
If STA (acceleration time constant) or STB (deceleration
time constant) is set to be longer, an error may occur in
the time of the arc part for the S-pattern
acceleration/deceleration time constant setting.
The upper limit value of the actual arc part time is limited
by
2000000
STA
for acceleration or by
2000000
STB
for
deceleration.
(Example) When STA, STB, and STC are set to 20000,
5000, and 200, respectively, the actual arc
part time is as follows.
Because of
2000000
20000
= 100 [ms] <
200 [ms]
,
it is limited to 100 [ms].
At time of
acceleration:
100 [ms]
Because of
2000000
5000
= 400 [ms] >
200 [ms]
,
it becomes 200 [ms] as
designed.
At time of
acceleration:
200 [ms]
0
PC03 S-pattern acceleration/deceleration time constant
This is used to smooth start/stop of the servo motor.
Set the time of the arc part for S-pattern
acceleration/deceleration.
Set the same value as for MR-J2S-_A_.
0 S
T
14 Torque command time constant
This is used to set the constant of a primary delay to the
torque command.
TQC: Torque command time constant
0
PC04 Torque command time constant
This is used to set the constant of a primary delay to
the torque command.
Set the same value as for MR-J2S-_A_.
0 T
15 Station
number
setting
Specifies the station No. of serial communication.
Always set one station to one axis of the servo amplifier.
Setting one station number to two or more stations will
disable a normal communication.
0 PC20
Station
number
setting
Used to set the station No. of the servo amplifier.
Setting range: 0 to 31
0 P
S
T
Torque
Torque command
After filtering
TQC
TQC
Time
STA
STC
STC
STB
STC
STC
0r/min
Speed
command
S
e
rvo
mo
to
r
sp
e
ed
time
Содержание MELSERVO-J2-Super Series
Страница 18: ...Part 1 Summary of MR J2S MR J2M Replacement 1 1 Part 1 Summary of MR J2S MR J2M Replacement ...
Страница 31: ...Part 1 Summary of MR J2S MR J2M Replacement 1 14 MEMO ...
Страница 109: ...Part 3 Review on Replacement of MR J2S _B_ with MR J4 _B_ 3 32 MEMO ...
Страница 161: ...Part 4 Review on Replacement of MR J2S _CP_ CL_ with MR J4 _A_ RJ 4 52 MEMO ...
Страница 219: ...Part 5 Review on Replacement of MR J2S 30 kW or Higher Capacity Models with MR J4 DU_ 5 58 MEMO ...
Страница 220: ...Part 6 Review on Replacement of MR J2M with MR J4 6 1 Part 6 Review on Replacement of MR J2M with MR J4 ...
Страница 239: ...Part 6 Review on Replacement of MR J2M with MR J4 6 20 MEMO ...
Страница 240: ...Part 7 Common Reference Material 7 1 Part 7 Common Reference Material ...
Страница 284: ...Part 7 Common Reference Material 7 45 Click Update Project ...
Страница 342: ...Part 8 Review on Replacement of Motor 8 1 Part 8 Review on Replacement of Motor ...
Страница 409: ...Part 8 Review on Replacement of Motor 8 68 MEMO ...
Страница 461: ...Part 9 Review on Replacement of Optional Peripheral Equipment 9 52 MEMO ...
Страница 462: ...Part 10 Startup Procedure Manual 10 1 Part 10 Startup Procedure Manual ...
Страница 464: ... Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 Appendix 1 1 Appendix 1 Summary of MR J4_B_ RJ020 MR J4 T20 ...







































































