





























11 PROCESS CONTROL INSTRUCTIONS
11.7 Auto Tuning
1391
11
Auto tuning procedure
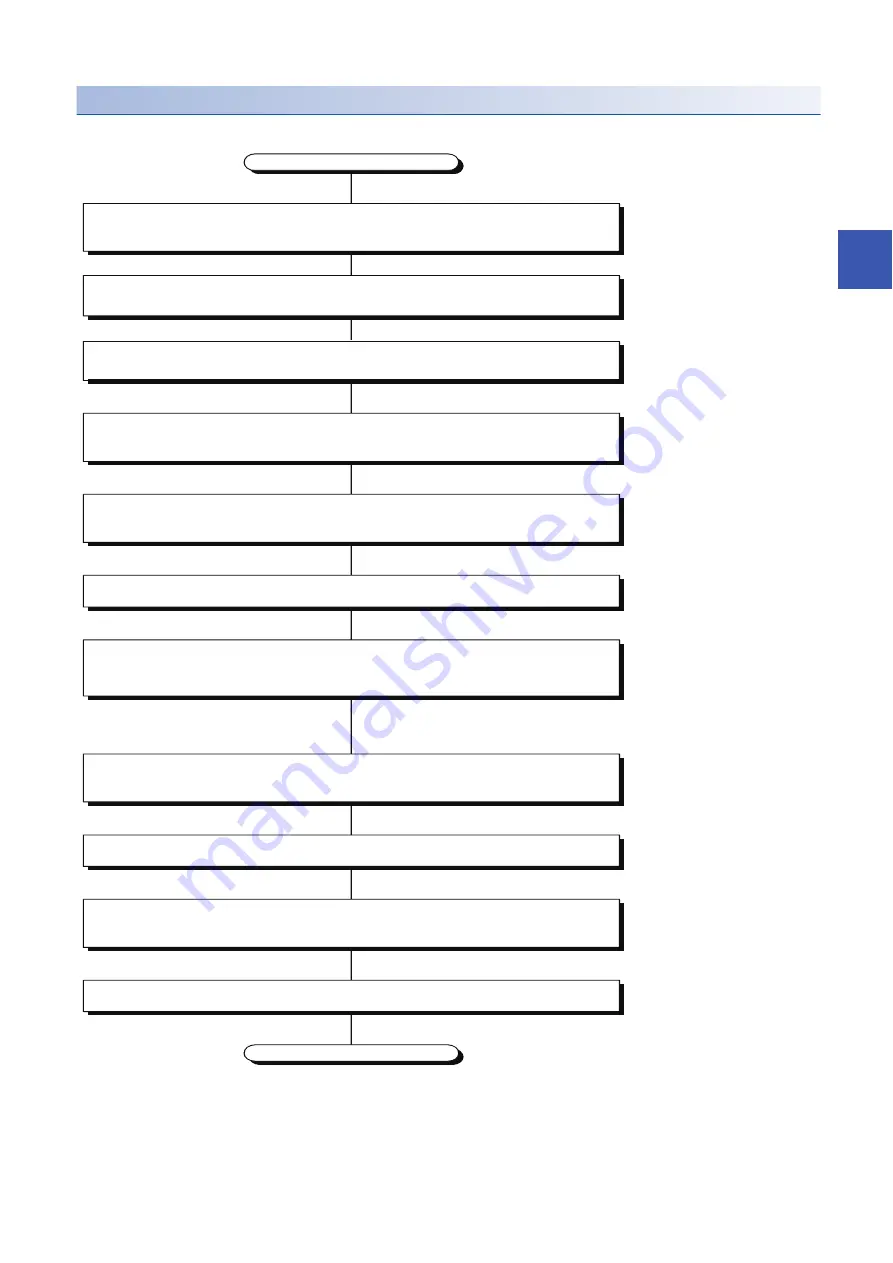
The following shows the auto tuning procedure.
Start
Record the PID constants as required because the
PID constants are overwritten at completion of auto tuning,
Set the loop tag and operation constant required for auto tuning.
Change the control mode (MODE) of the tuning target loop to MAN.
Check that the process of the tuning target loop is stable.
(Adjust the MV as required so that the process is stabilized.)
Disconnect the S.2PID/S.PID instruction of the tuning target loop and connect the
S.AT1 instruction to where the S.2PID/S.PID instruction was located.
Set the auto tuning start signal (e1) to 1 (Start).
(Auto tuning)
The auto tuning completion status (BB16) is set to 1 (Completed) at completion of auto tuning.
Set the auto tuning start signal (e1) to 0 (End).
(The auto tuning completion status (BB16) is set to 0 (Not completed).)
Check the PID constants stored in the loop tag.
Disconnect the S.AT1 instruction of the tuning target loop and connect the
S.2PID/S.PID instruction to where the S.AT1 instruction was located.
Make fine adjustment during normal operation.
End
Summary of Contents for MELSEC iQ-R Series
Page 1: ...MELSEC iQ R Programming Manual Instructions Standard Functions Function Blocks ...
Page 2: ......
Page 24: ...22 INDEX 2092 INSTRUCTION INDEX 2093 REVISIONS 2104 WARRANTY 2105 TRADEMARKS 2106 ...
Page 34: ...32 MEMO ...
Page 35: ...33 PART 1 PART 1 OVERVIEW This part consists of the following chapter 1 OVERVIEW ...
Page 68: ...66 1 OVERVIEW 1 5 Precautions on Programming MEMO ...
Page 1448: ...1446 14 REDUNDANT SYSTEM INSTRUCTIONS 14 2 Disabling Enabling System Switching MEMO ...
Page 1972: ...1970 33 TIME DATA TYPE FUNCTIONS 33 4 Division MEMO ...
Page 2067: ...APPX Appendix 5 PID Control Program Examples 2065 A 252 Set PID control data for loop 2 ...
Page 2109: ......







































































