1766
22 POSITIONING INSTRUCTIONS
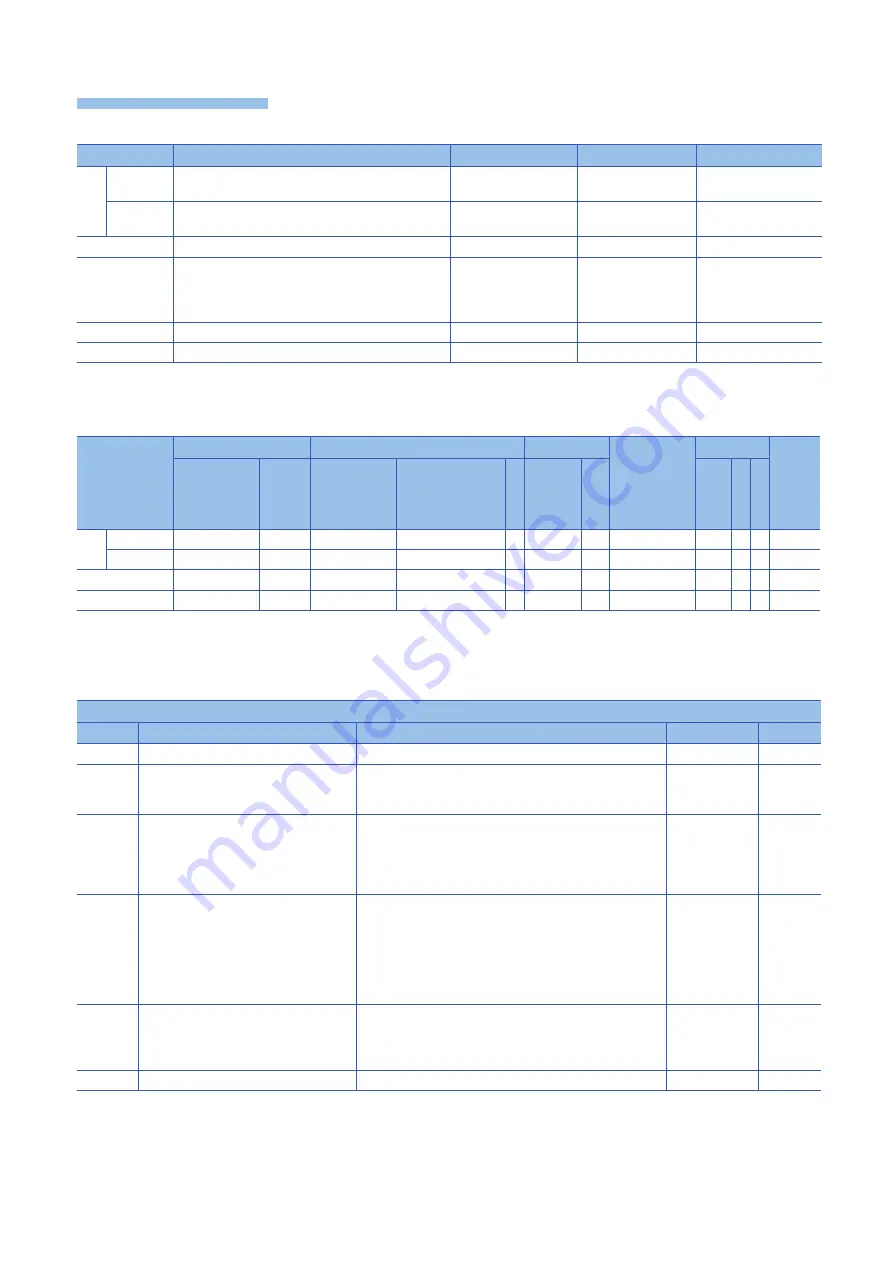
22.1 Restoring the Absolute Position
Setting data
■
Description, range, data type
*1 When specifying setting data by using a label, define an array to secure enough operation area and specify an element of the array
label.
■
Applicable devices
*1 FX and FY cannot be used.
*2 T, ST, C, and FD cannot be used.
*3 FD cannot be used.
■
Control data
Operand
Description
Range
Data type
Data type (label)
(U)
G.ABRST
Start I/O number (first three digits in four-digit
hexadecimal representation) of a module
00H to FEH
16-bit unsigned binary
ANY16
Z.ABRST
Start I/O number (first three digits in four-digit
hexadecimal representation) of a module
00H to FEH
String
ANY16_OR_STRING_S
INGLE
(s)
Start device where the control data is stored
Refer to the control data.
Device name
ANY16
(d)
Device to be turned on one scan upon completion of
instruction
If the instruction is completed with an error, (d)+1 is also
turned on.
Bit
ANYBIT_ARRAY
(Number of elements: 2)
EN
Execution condition
Bit
BOOL
ENO
Execution result
Bit
BOOL
Operand
Bit
Word
Double word Indirect
specification
Constant
Others
(U)
X, Y, M, L,
SM, F, B, SB,
FX, FY
J
\
T, ST, C, D,
W, SD, SW,
FD, R, ZR,
RD
U
\G
, J
\
,
U3E
\(H)G
Z LT, LST,
LC
LZ
K, H E $
(U)
G.ABRST
Z.ABRST
(s)
(d)
Operand: (s)
Device
Item
Description
Setting range
Set by
+0
System area
+1
Completion status
The instruction completion status is stored.
• 0: Completed successfully
• Other than 0: Completed with an error (error code)
System
+2
Signal received from the servo amplifier
Write the signal status, below, imported from the servo amplifier
to the input module.
• b0: ABS data bit 0
• b1: ABS data bit 1
• b2: Send data ready flag
0, 1
User
+3
Signal to be sent to the servo amplifier
Performs the operation with the dedicated instruction by using
the "Signal received from the servo amplifier" in (s)+2. The ON/
OFF state of the following data, output to the servo amplifier, is
stored.
• b0: Servo on
• b1: ABS transfer mode
• b2: ABS request flag
System
+4
Status
Status of communication with the servo amplifier
• 0: Communication complete (set by the user at start of
communication)
• Other than 0: Now communicating (stored by the system)
0
User/
system
+5 to +7
System area
Summary of Contents for MELSEC iQ-R Series
Page 1: ...MELSEC iQ R Programming Manual Instructions Standard Functions Function Blocks ...
Page 2: ......
Page 24: ...22 INDEX 2092 INSTRUCTION INDEX 2093 REVISIONS 2104 WARRANTY 2105 TRADEMARKS 2106 ...
Page 34: ...32 MEMO ...
Page 35: ...33 PART 1 PART 1 OVERVIEW This part consists of the following chapter 1 OVERVIEW ...
Page 68: ...66 1 OVERVIEW 1 5 Precautions on Programming MEMO ...
Page 1448: ...1446 14 REDUNDANT SYSTEM INSTRUCTIONS 14 2 Disabling Enabling System Switching MEMO ...
Page 1972: ...1970 33 TIME DATA TYPE FUNCTIONS 33 4 Division MEMO ...
Page 2067: ...APPX Appendix 5 PID Control Program Examples 2065 A 252 Set PID control data for loop 2 ...
Page 2109: ......