1390
11 PROCESS CONTROL INSTRUCTIONS
11.7 Auto Tuning
11.7
Auto Tuning
Auto tuning is designed to make initial setting of PID constants.
Auto tuning can be used for processes that can be approximated with the "primary lag plus dead time" represented by the
following expression.
Ex.
Process with relatively slow response such as temperature control
K: Gain, T: Time constant, L: Dead time, s: Laplace operator
Auto tuning can be used for the loop that uses S.PID or S.2PID instruction.
Auto tuning is performed in the ZN method: step response method of Ziegler and Nichols.
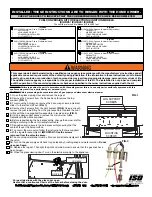
Outline of step response method
With no control operation being performed, change the manipulated value (MV) in a stepwise manner and look how the
process value (PV) varies.
• When MV is changed in a stepwise manner, PV begins to change slowly. Soon, the change speed becomes faster and then
becomes slow again, and finally is settled as a fixed value.
• Draw a tangent line at the place where PV varies fastest, and find the points of intersection A and B where the tangent line
crosses the horizontal axis corresponding to the first process value (
0
) and last process value (
1
). This obtains the
equivalent dead time (L) and equivalent time constant (T) as shown below.
• Determine maximum ramp (response speed) R = Y/T from the equivalent time constant (T) and maximum process value
width (Y). Apply the equivalent dead time (L) and maximum ramp (R) to the Ziegler and Nichols' adjustment rule to
calculate the proportional gain KP(P), integral constant TI(I), and derivative constant TD(D).
e
1+Ts
K
-Ls
L
T
A
θ
0
θ
1
B
Y
T
R=
X%
[%]
Y%
AT1MV
PV
t
Summary of Contents for MELSEC iQ-R Series
Page 1: ...MELSEC iQ R Programming Manual Instructions Standard Functions Function Blocks ...
Page 2: ......
Page 24: ...22 INDEX 2092 INSTRUCTION INDEX 2093 REVISIONS 2104 WARRANTY 2105 TRADEMARKS 2106 ...
Page 34: ...32 MEMO ...
Page 35: ...33 PART 1 PART 1 OVERVIEW This part consists of the following chapter 1 OVERVIEW ...
Page 68: ...66 1 OVERVIEW 1 5 Precautions on Programming MEMO ...
Page 1448: ...1446 14 REDUNDANT SYSTEM INSTRUCTIONS 14 2 Disabling Enabling System Switching MEMO ...
Page 1972: ...1970 33 TIME DATA TYPE FUNCTIONS 33 4 Division MEMO ...
Page 2067: ...APPX Appendix 5 PID Control Program Examples 2065 A 252 Set PID control data for loop 2 ...
Page 2109: ......