





























1342
11 PROCESS CONTROL INSTRUCTIONS
11.3 Control Operation Instructions
■
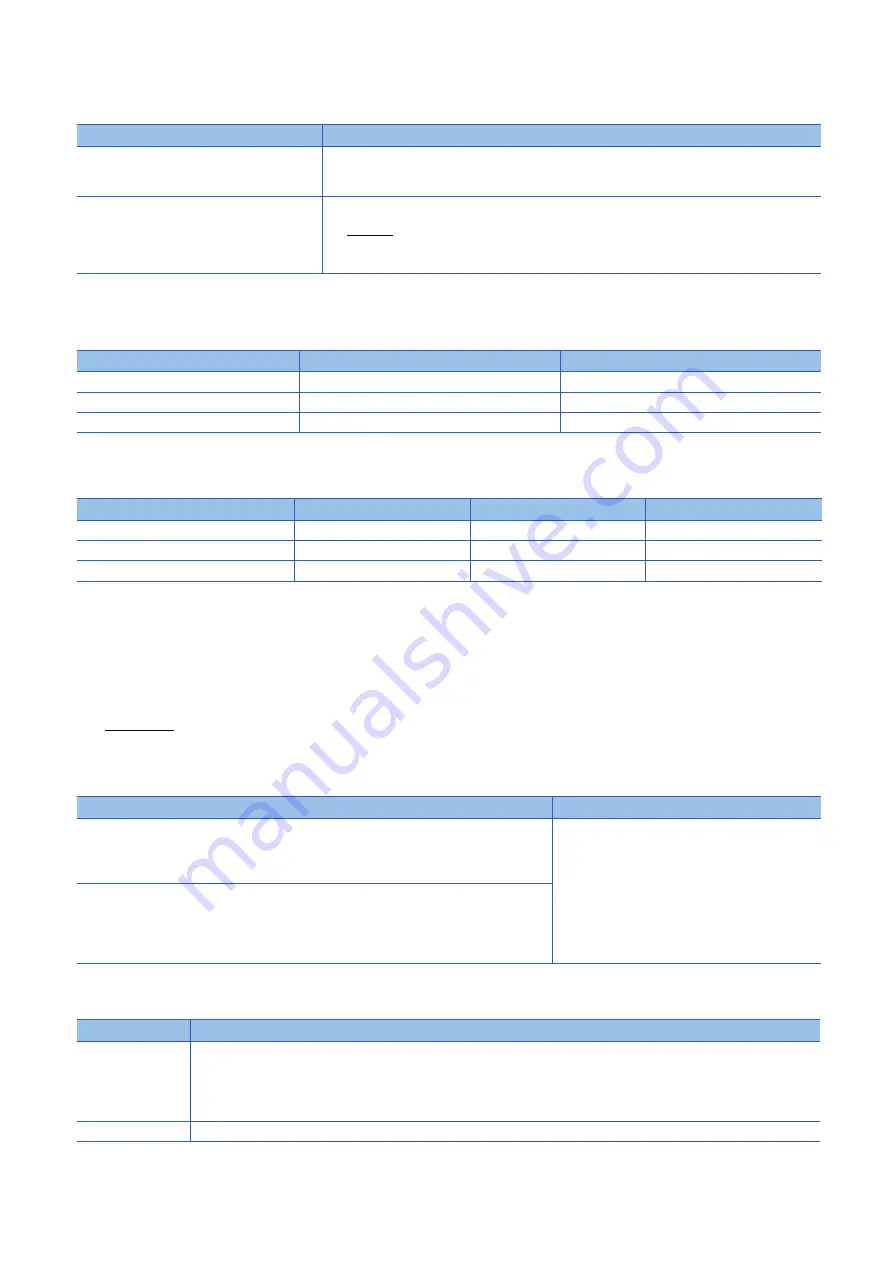
Mode check (3)
The following processing is performed depending on the control mode (MODE).
■
Variation rate & upper/lower limiter (4)
The instruction checks the variation rate and upper/lower limit values for the input value 1 (E1) or 2 (E2).
The variation rate limiter conditions are shown below.
*1 If the DMLI or ERRI of the disable alarm detection (INH) is set to 1, the output variation rate alarm (BB4) and the DMLA of the alarm
detection (ALM) are set to 0.
The upper/lower limiter conditions are shown below.
*2 If the MHI or ERRI of the disable alarm detection (INH) is set to 1, the output upper limit alarm (BB2) and the MHA of the alarm detection
(ALM) are set to 0.
*3 If the MLI or ERRI of the disable alarm detection (INH) is set to 1, the output lower limit alarm (BB3) and the MLA of the alarm detection
(ALM) are set to 0.
■
Output conversion processing (5)
The instruction performs engineering value transformation using the following expression.
■
Tracking processing (6)
Processing is performed when the following conditions are satisfied.
■
Loop stop processing (7)
The following processing is performed according to the SPA status of the alarm detection (ALM).
Control mode (MODE)
Processing details
MAN, CMB, CMV, LCM
"Output conversion processing (5)" is performed.
The MHA, MLA, and DMLA of the alarm detection (ALM) are set to 0.
The alarm bits (BB1, BB2, BB3, and BB4) are set to 0.
AUT, CAB, CAS, CCB, CSV, LCA, LCC
The instruction performs engineering value inverse transformation using the following expression.
"Variation rate & upper/lower limiter processing (4)" is performed.
Condition
T'
BB4, DMLA
|T-MV
n
|
DML
T'=T
0
(T-MV
n
)>DML
T'=MV
n
+DML
1
(T-MV
n
)<-DML
T'=MV
n
-DML
1
Condition
MV
BB2, MHA
BB3, MLA
T'>MH
MV
n
=MH
1
0
T'<ML
MV
n
=ML
0
1
ML
T'
MH
MV
n
=T'
0
0
Condition
Processing
When all of the following conditions are satisfied:
• The control mode (MODE) is set to any of the following: MAN, CMB, CMV, or LCM.
• Tracking bit (TRK) is 1.
E
n
=MV
n
Operation result is output to the input value 1 (E1) or 2
(E2).
When all of the following conditions are satisfied:
• The control mode (MODE) is set to any of the following: AUT, CAS, CAB, CCB, CSV, LCA, or LCC.
• Tracking bit (TRK) is 1.
• BB alarm (BB1) = 1
E
n
=MV
n
SPA status
Processing details
1
The loop stops. When the loop stops, the following operations are performed and the S.SEL instruction ends.
• The output value (BW) is held.
• The alarm bits (BB1, BB2, BB3, and BB4) are set to 0.
• The MHA, MLA, and DMLA of the alarm detection (ALM) are set to 0.
• The control mode (MODE) is set to MAN.
0
Processing from "Engineering value transformation (1)" through to "Tracking processing (6)" is performed.
T=
×
(PV-RL)
100
RH-RL
BW=
×MV
n
+NMIN
100
NMAX-NMIN
Summary of Contents for MELSEC iQ-R Series
Page 1: ...MELSEC iQ R Programming Manual Instructions Standard Functions Function Blocks ...
Page 2: ......
Page 24: ...22 INDEX 2092 INSTRUCTION INDEX 2093 REVISIONS 2104 WARRANTY 2105 TRADEMARKS 2106 ...
Page 34: ...32 MEMO ...
Page 35: ...33 PART 1 PART 1 OVERVIEW This part consists of the following chapter 1 OVERVIEW ...
Page 68: ...66 1 OVERVIEW 1 5 Precautions on Programming MEMO ...
Page 1448: ...1446 14 REDUNDANT SYSTEM INSTRUCTIONS 14 2 Disabling Enabling System Switching MEMO ...
Page 1972: ...1970 33 TIME DATA TYPE FUNCTIONS 33 4 Division MEMO ...
Page 2067: ...APPX Appendix 5 PID Control Program Examples 2065 A 252 Set PID control data for loop 2 ...
Page 2109: ......







































































