





























Chapter 6 Control Modes of Operation
6-2
Revision June 2010
6.2 Position
Control
Mode
The position control mode is usually used for the applications requiring precision positioning,
such as industry positioning machine, indexing table etc. The external pulse train with
direction which can control the rotation angle of servo motor. The max. input frequency for
the external pulse command is 4Mpps.
For the closed-loop positioning, speed control loop is the principal part and the auxiliary
parameters are position loop gain and feed forward compensation. The users can also select
two kinds of tuning mode (Manual/Auto modes) to perform gain adjustment. This Section 6.2
mainly describes the applicability of loop gain adjustment and feed forward compensation of
Delta servo system.
6.2.1 Command Source of Position (PT) Control Mode
The command source of P mode is external pulse train input form terminals. There are
three types of pulse input and each pulse type is with
·
logic type (positive (+), negative (-)).
They all can be set in parameter P1-00. Please refer to the following relevant parameters:
P1 - 00
▲
PTT
External Pulse Input Type
Communication Addr.:
0100H, 0101H
Default: 2
Related Section:
Applicable Control Mode: PT
Section 6.2.1
Unit: N/A
Range: 0 ~ 1132
Data Size: 16bit
Display Format: HEX
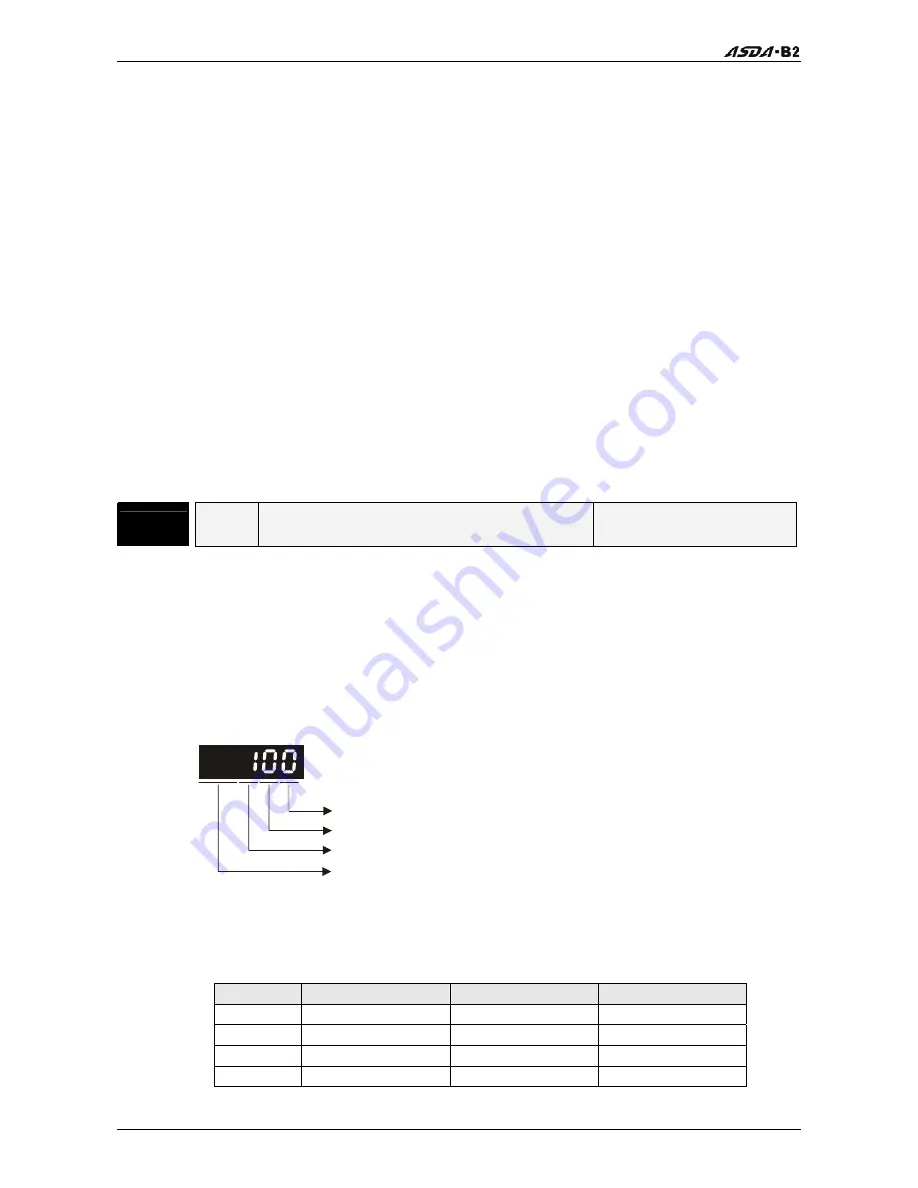
Settings:
not used
A
B
C
•
Value A: Pulse type
A=0: AB phase pulse (4x)
A=1: CW + CCW pulse
A=2: Pulse + Direction
Other settings:
B: Input pulse filter
This setting is used to suppress or reduce the chatter caused by the noise, etc.
However, if the instant input pulse filter frequency is over high, the frequency that
exceeds the setting value will be regarded as noise and filtered.
B
Low Filter
Setting Value
High Filter
0
1.66Mpps 0 6.66Mpps
1 416Kpps
1
1.66Mpps
2 208Kpps
2
833Kpps
3 104Kpps
3
416Kpps
Summary of Contents for ASD-B2-0121-B
Page 1: ......
Page 13: ...Table of Contents xii Revision June 2010 This page intentionally left blank...
Page 17: ...Chapter 1 Unpacking Check and Model Explanation 1 4 Revision June 2010 ECMA Series Servo Motor...
Page 87: ...Chapter 4 Display and Operation 4 12 Revision June 2010 This page intentionally left blank...
Page 131: ...Chapter 6 Control Modes of Operation 6 22 Revision June 2010 Time Domain...
Page 267: ...Chapter 8 MODBUS Communications 8 18 Revision June 2010 This page intentionally left blank...
Page 271: ...Chapter 9 Maintenance and Inspection 9 4 Revision June 2010 This page intentionally left blank...
Page 291: ...Chapter 11 Specifications 11 8 Revision June 2010 11 3 Servo Motor Speed Torque Curves...







































































