





























Chapter 7 Servo Parameters
7-84
Revision June 2010
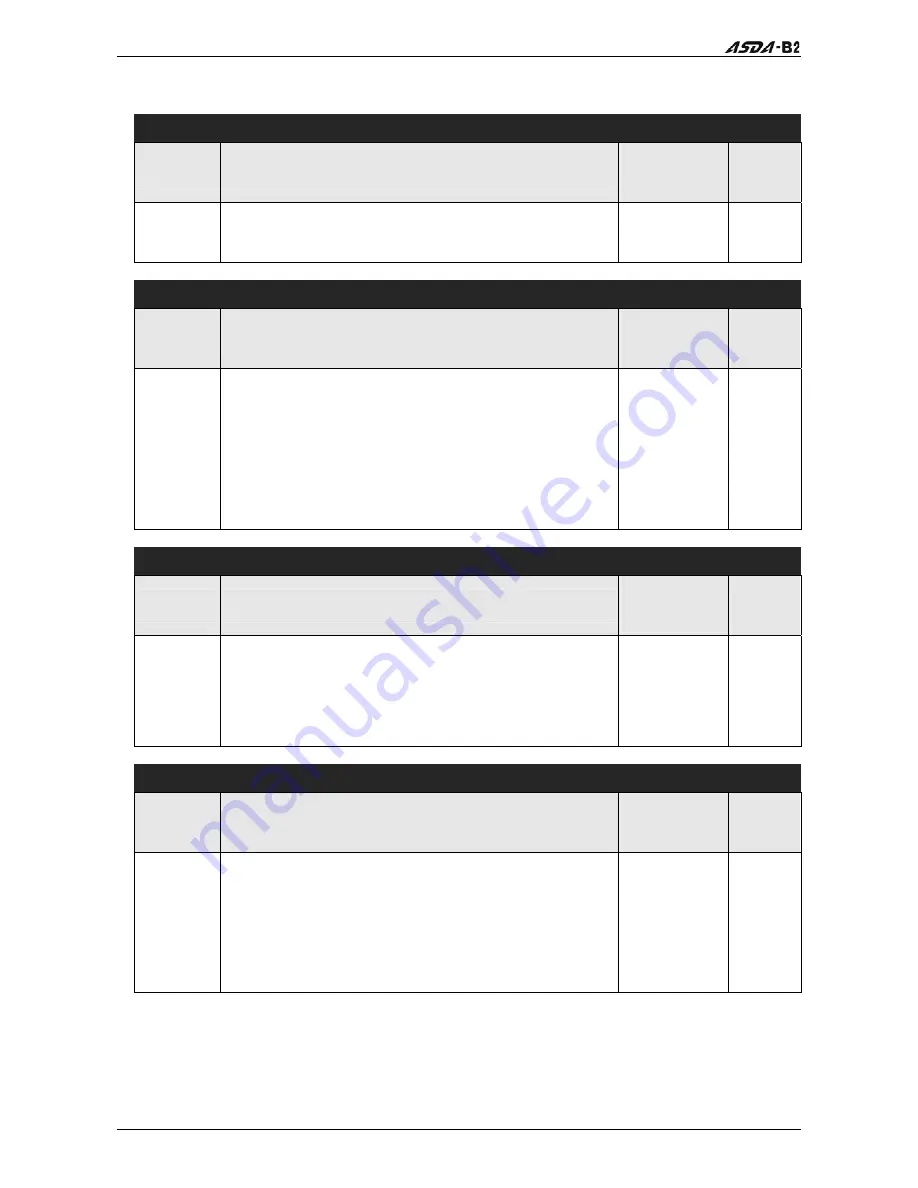
Table 7.A Input Function Definition
Setting value: 0x01
DI Name
DI Function Description
Trigger
Method
Control
Mode
SON
Servo On. When this DI is activated, it indicates the
servo drive is enabled.
Level
Triggered
All
Setting value: 0x02
DI Name
DI Function Description
Trigger
Method
Control
Mode
ARST
A number of Faults (Alarms) can be cleared by
activating ARST. Please see table 10-3 for applicable
faults that can be cleared with the ARST command.
However, please investigate Fault or Alarm if it does
not clear or the fault description warrants closer
inspection of the drive system.
Rising-edge
Triggered
All
Setting value: 0x03
DI Name
DI Function Description
Trigger
Method
Control
Mode
GAINUP
Gain switching in speed and position mode. When
GAINUP is activated (P2-27 is set to 1), the gain is
switched to the gain multiplied by gain switching
rate.
Level
Triggered
PT S
Setting value: 0x04
DI Name
DI Function Description
Trigger
Method
Control
Mode
CCLR
When CCLR is activated, the setting parameter P2-50
Pulse Clear Mode is executed.
0: After CCLR is activated (ON), the position
accumulated pulse number will be cleared
continuously.
Rising-edge
Triggered,
Level
Triggered
PT
Summary of Contents for ASD-B2-0121-B
Page 1: ......
Page 13: ...Table of Contents xii Revision June 2010 This page intentionally left blank...
Page 17: ...Chapter 1 Unpacking Check and Model Explanation 1 4 Revision June 2010 ECMA Series Servo Motor...
Page 87: ...Chapter 4 Display and Operation 4 12 Revision June 2010 This page intentionally left blank...
Page 131: ...Chapter 6 Control Modes of Operation 6 22 Revision June 2010 Time Domain...
Page 267: ...Chapter 8 MODBUS Communications 8 18 Revision June 2010 This page intentionally left blank...
Page 271: ...Chapter 9 Maintenance and Inspection 9 4 Revision June 2010 This page intentionally left blank...
Page 291: ...Chapter 11 Specifications 11 8 Revision June 2010 11 3 Servo Motor Speed Torque Curves...







































































