





























Appendices
A - 64
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
•
Select the position error threshold at which the positioning completion signal (INP1) is output.
The default unit is command units, but Position Setting Unit Selection (3520 hex) can be used to
convert to external encoder units. However, note that the unit for the Following error window
(6065 hex) will change as well.
•
This setting is also used for the Target reached flag in the EtherCAT communications status. The
unit, however, is always command units regardless of the setting of Position Setting Unit Selection
(3520 hex).
•
This object gives the present speed.
•
This object sets the force command in the Cyclic synchronous torque mode.
•
This object sets the maximum force.
•
Set the value in units of 0.1% of the rated force (100%).
•
This object gives the Servo Drive’s internal force command value.
•
Set the value in units of 0.1% of the rated force (100%).
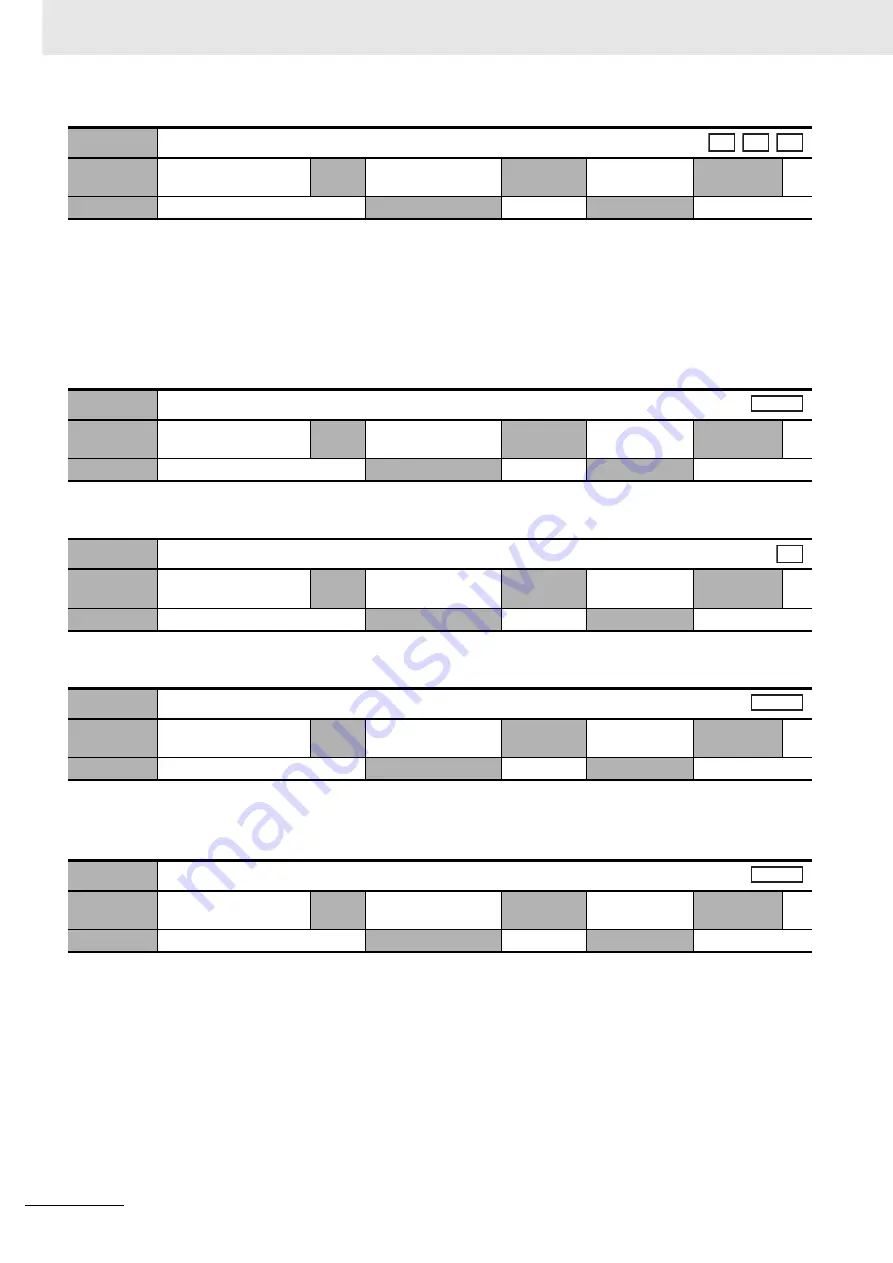
6067 hex
Position window
Setting
range
0 to 262,144
Unit
Command unit
Default
setting
10
Data
attribute
A
Size
4 bytes (U32)
Access
RW
PDO map
Not possible
606C hex
Velocity actual value
Setting
range
–2,147,483,647 to
2,147,483,647
Unit
Command unit/s
Default
setting
0
Data
attribute
–
Size
4 bytes (INT32)
Access
RO
PDO map
Possible
6071 hex
Target torque
Setting
range
–5,000 to 5,000
Unit
0.1%
Default
setting
0
Data
attribute
A
Size
2 bytes (INT16)
Access
RW
PDO map
Possible
6072 hex
Max torque
Setting
range
0 to 5,000
Unit
0.1%
Default
setting
5,000
Data
attribute
A
Size
2 bytes (U16)
Access
RW
PDO map
Possible
6074 hex
Torque demand
Setting
range
–5,000 to 5,000
Unit
0.1%
Default
setting
0
Data
attribute
–
Size
2 bytes (INT16)
Access
RO
PDO map
Possible
hm
csp
pp
A l l
cst
A l l
A l l
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































