





























Appendices
A - 128
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
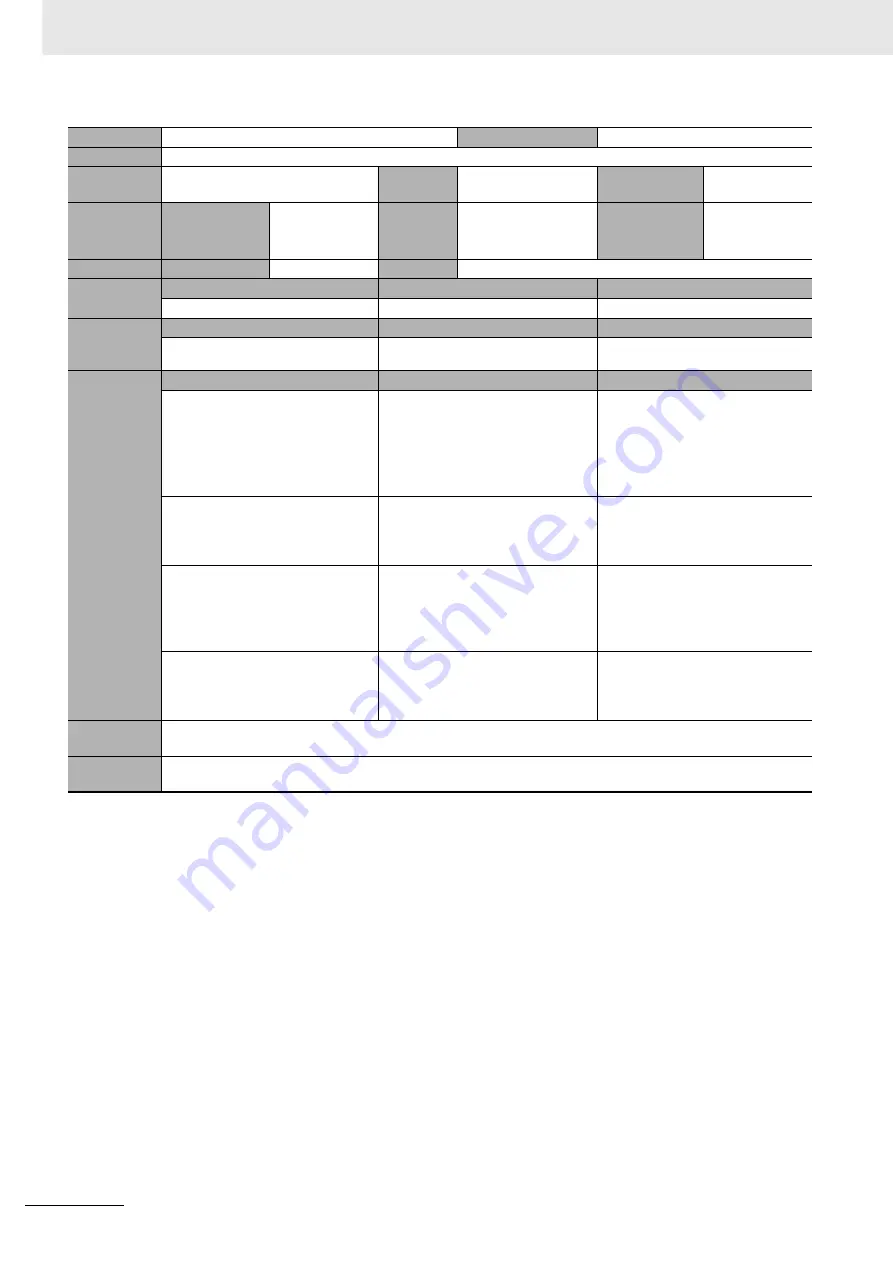
Event name
Motor Combination Error 2
Event code
2803 0000 hex
Description
The value set for the motor exceeds the drive range of the motor.
Source
EtherCAT Master Function Module
Source
details
Slave
Detection
timing
Continuously
Error
attributes
Level
Minor fault
Recovery
Error reset
(after cycling slave
power)
Log category
System
Effects
User program
Continues.
Operation
Power drive circuit is OFF for relevant slave.
Indicators
EtherNet/IP NET RUN
EtherNet/IP NET ERR
EtherNet/IP LINK/ACT
–
–
–
System
-defined
variables
Variable
Data type
Name
None
–
–
Cause and
correction
Assumed cause
Correction
Prevention
The Motor Rated Rms Current is
too low compared with the
maximum motor capacity of the
Servo Drive.
Check the Motor Rated Rms
Current (3906 hex) and correct the
set value if incorrect.
If the set value is correct, replace
the Servo Drive with one whose
maximum motor capacity is lower.
Make sure that the value set for
the Motor Rated Rms Current
(3906 hex) is correct.
Use a Servo Drive that matches
the Motor Rated Rms Current.
The percentage of the Motor Coil
Unit Mass to the Motor Rated
Force is too high.
Check the Motor Coil Unit Mass
(3904 hex)/ Motor Rated Force
(3905 hex) and correct the set
value if incorrect.
Make sure that the values set for
the Motor Coil Unit Mass
(3904 hex) and Motor Rated
Force (3905 hex) are correct.
The automatically adjusted
Current Loop Proportional
Gain/Current Loop Integral Gain is
too high.
Check the values set for the Motor
Rated Rms Current (3906 hex),
Motor Inductance (3908 hex), and
Motor Resistance (3909 hex) and
correct the set value if incorrect.
Make sure that the values set for
the Motor Rated Rms Current
(3906 hex), Motor Inductance
(3908 hex), and Motor Resistance
(3909 hex) are correct.
The percentage of the Motor
Rated Rms Current to the rated
current of the motor is greater
than 500%.
Check the Motor Rated Rms
Current (3906 hex)/Motor Peak
Absolute Current (3907 hex) and
correct the set value if incorrect.
Make sure that the value set for
the Motor Rated Rms Current
(3906 hex)/Motor Peak Absolute
Current (3907 hex) is correct.
Attached
information
None
Precautions/
Remarks
“60” is displayed on the Servo Drive front panel and F260 is given as the Alarm Code (4001 hex).
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































