





























12 Troubleshooting and Maintenance
12 - 12
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
Precautions for Correct Use
Precautions for Correct Use
•
To prevent operation from running out of control for an immediate stop, set an allowable
overspeed value in Overspeed Detection Level Setting at Immediate Stop (3615 hex). An
Overspeed 2 Error (Error No. 26.1) does not cause an immediate stop, therefore if this occurs,
the motor will switch to operation B (605E hex).
•
Set a higher value for the Overspeed Detection Level Setting at Immediate Stop (3615 hex)
than for the Overspeed Detection Level Setting (3513 hex). If a value lower than the
Overspeed Detection Level Setting (3513 hex) is set, an Overspeed 2 Error (Error No. 26.1)
will occur before an Overspeed Error (Error No. 26.0). Thus an immediate stop will not occur. If
an Overspeed Error (Error No. 26.0) and an Overspeed 2 error (Error No. 26.1) occur at the
same time, the immediate stop will not occur, either.
•
If the actual speed is not lower than 30 mm/s after the time set in the Error Detection Allowable
Time Setting (3614 hex) elapses from when an error that causes the operation A occurs, the
deceleration method switches to the operation B.
•
If an error that causes the operation B also occurs during deceleration with the operation A,
the operation B has a priority as the deceleration method.
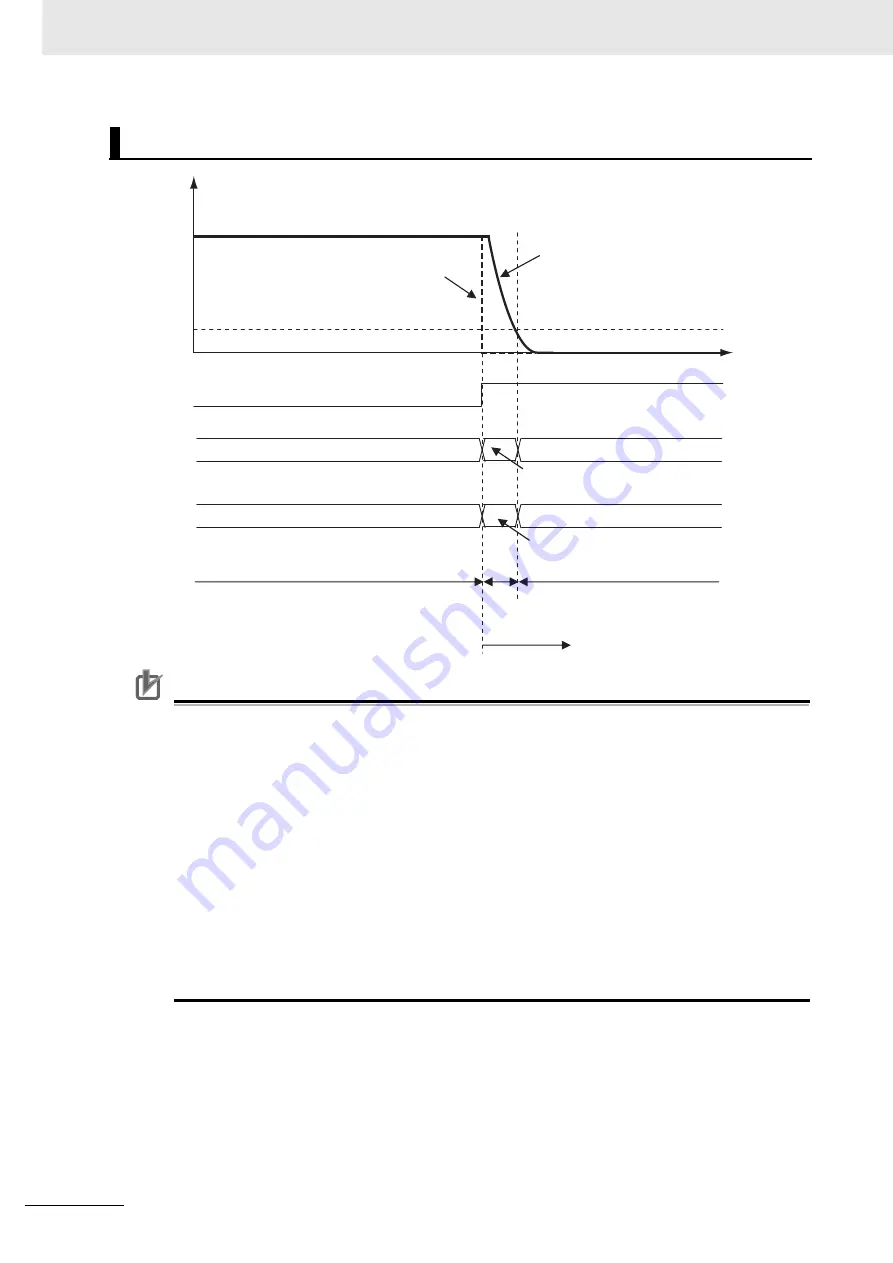
Immediate Stop Operation
[mm/s]
Motor speed
Normal force limit
Normal force limit
Error occurs for immediate stop
No error
Error
Speed
deemed
as stop
[30 mm/s]
Overspeed
protection
threshold
Normal operation
Normal operation
Overspeed Detection Level Setting at Immediate Stop (3615 hex)
(to protect again runaway for immediate stops)
Immediate Stop Force (3511 hex)
(measure to reduce shock for immediate stops)
Force limit
Speed
Time
Immediate stop
operation
Immediate stop time
Normal operation
(Command from the Host)
Speed command
In the error status, operation B
(605E hex) (Operation after stopping:
Dynamic brake/free)
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































