





























9 - 51
9 Servo Parameter Objects
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
9-
7 Specia
l Ob
jects
9
•
Set the speed to estimate the load characteristic while the realtime autotuning is enabled.
•
The higher the set value is, the earlier the load characteristic change is followed, but the estimated
variation against the disturbance becomes greater.
•
The estimated results is updated in every 30 minutes and saved in EEPROM.
Explanation of Settings
For details on realtime autotuning, refer to 11-3 Realtime Autotuning on page 11-7.
•
Make detailed settings for the autotuning function, when 6: the customized mode is selected in the
Realtime Autotuning Mode Selection (3002 hex).
For the Realtime Autotuning Mode Selection (3002 hex), refer to Realtime Autotuning Mode
Selection on page 9-4.
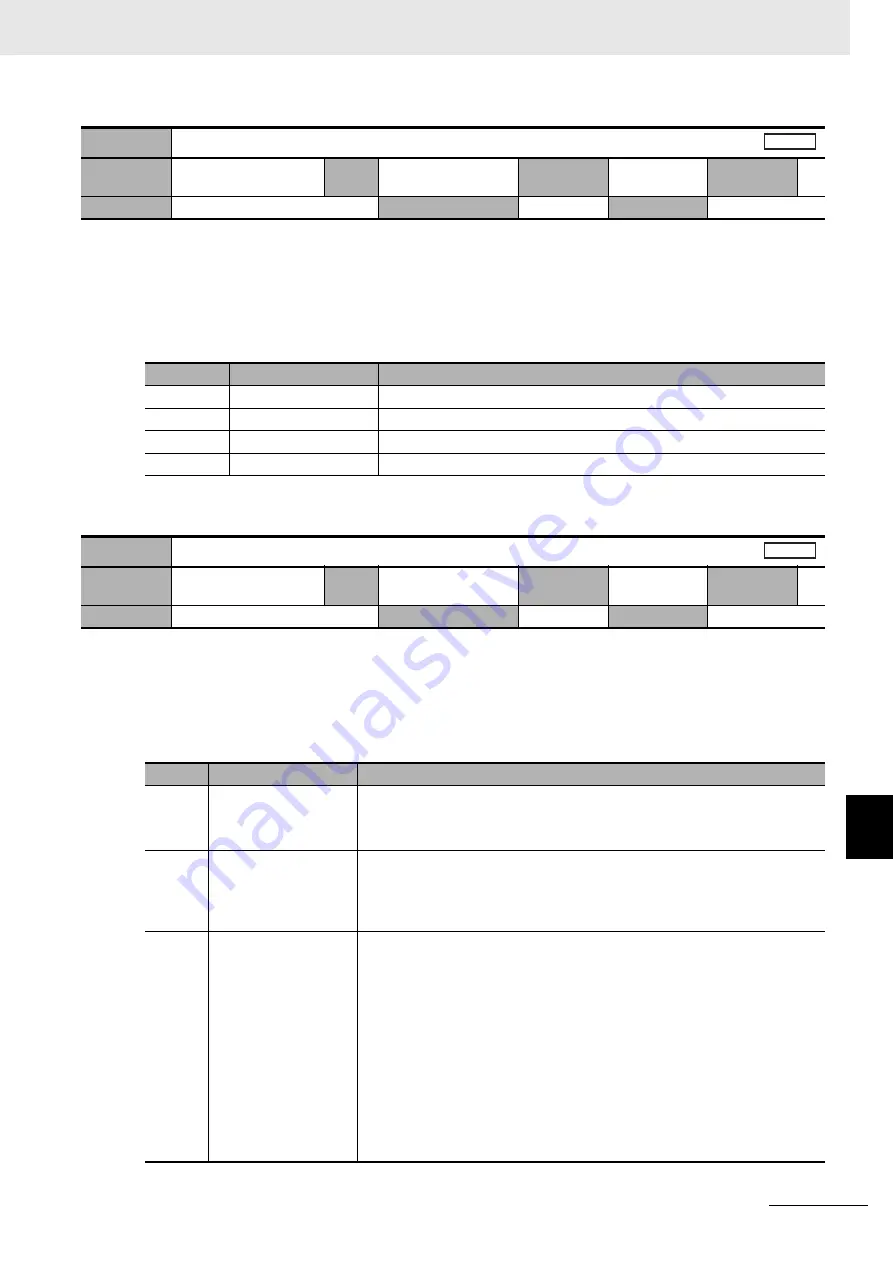
Explanation of Settings
3631 hex
Realtime Autotuning Estimated Speed Selection
Setting
range
0 to 3
Unit
–
Default
setting
1
Data
attribute
B
Size
2 bytes (INT16)
Access
RW
PDO map
Not possible
Set value
Mode
Description
0
No change
Stops load estimation.
1
Little change
Estimates every minute from the load characteristic changes.
2
Gradual change
Estimates every second from the load characteristic changes.
3
Sharp change
Estimates the optimum from the load characteristic changes.
3632 hex
Realtime Autotuning Customization Mode Setting
Setting
range
–32,768 to 32,767
Unit
–
Default
setting
0
Data
attribute
B
Size
2 bytes (INT16)
Access
RW
PDO map
Not possible
Bit
Name
Description
0 to 1
Load characteristic
estimation
*1
Select to enable or disable load characteristic estimation.
0: Disabled
1: Enabled
2 to 3
Mass ratio updating
Select whether to update the present set value of the Mass Ratio (3004 hex)
with the load characteristic estimation result.
0: Use the present set value.
1: Update with the estimation result.
4 to 6
Force compensation
Select whether to update the Force Command Value Offset (3607 hex),
Positive Direction Force Offset (3608 hex), or Negative Direction Force Offset
(3609 hex) value with the load characteristic estimation result.
0: Use the present set value.
1: Disable the force compensation. Clear the above three objects to zero.
2: Unbalanced load. Update 3607 hex. Clear 3608 hex and 3609 hex to zero.
3: Friction compensation (small). Update 3607 hex. Set a small
compensation to 3608 hex and 3609 hex.
4: Friction compensation (intermediate). Update 3607 hex. Set an
intermediate compensation in 3608 hex and 3609 hex.
5: Friction compensation (large). Update 3607 hex. Set a large
compensation in 3608 hex and 3609 hex.
A l l
A l l
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































