





























9 Servo Parameter Objects
9 - 52
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
*1
When load characteristic estimation is disabled, mass ratio updating is also disabled, even if the latter is set to
be updated with the estimation result. When force compensation is updated with the estimation result, load
characteristic estimation is disabled.
Precautions for Correct Use
Precautions for Correct Use
This object must be set in units of bits.
Users must be fully aware that proper operation of your system is not guaranteed, if you have
incorrect object settings. Pay a particular attention when you set them.
Additional Information
Procedure to Set the Object Bit by Bit
Follow these steps and calculate the set values, when you make any setting other than 0.
(1) Confirm the least significant bit (LSB) in each set value.
E.g. LSB of force compensation function: 4
(2) Multiply the set value by 2 to the power of the bit number of the LSB.
E.g. To set the force compensation to Friction compensation (small): The set value is 3.
The exponent is 4.
2
4
× 3 = 48
(3) Repeat Step (1) and (2) for all bit settings. Add all results and set the outcome to 3632 hex.
E.g. When all of the Load characteristic estimation, the Inertia ratio updating, the
Rigidity setting, and the Gain switch setting are enabled, the Torque compensation is
set to Friction compensation (small), and the Fixed object setting is set to a Fixed value:
2
0
× 1 + 2
2
× 1 + 2
4
× 3 + 2
7
× 1 + 2
8
× 1 + 2
9
× 2 = 1461
For details on realtime autotuning, refer to 11-3 Realtime Autotuning on page 11-7.
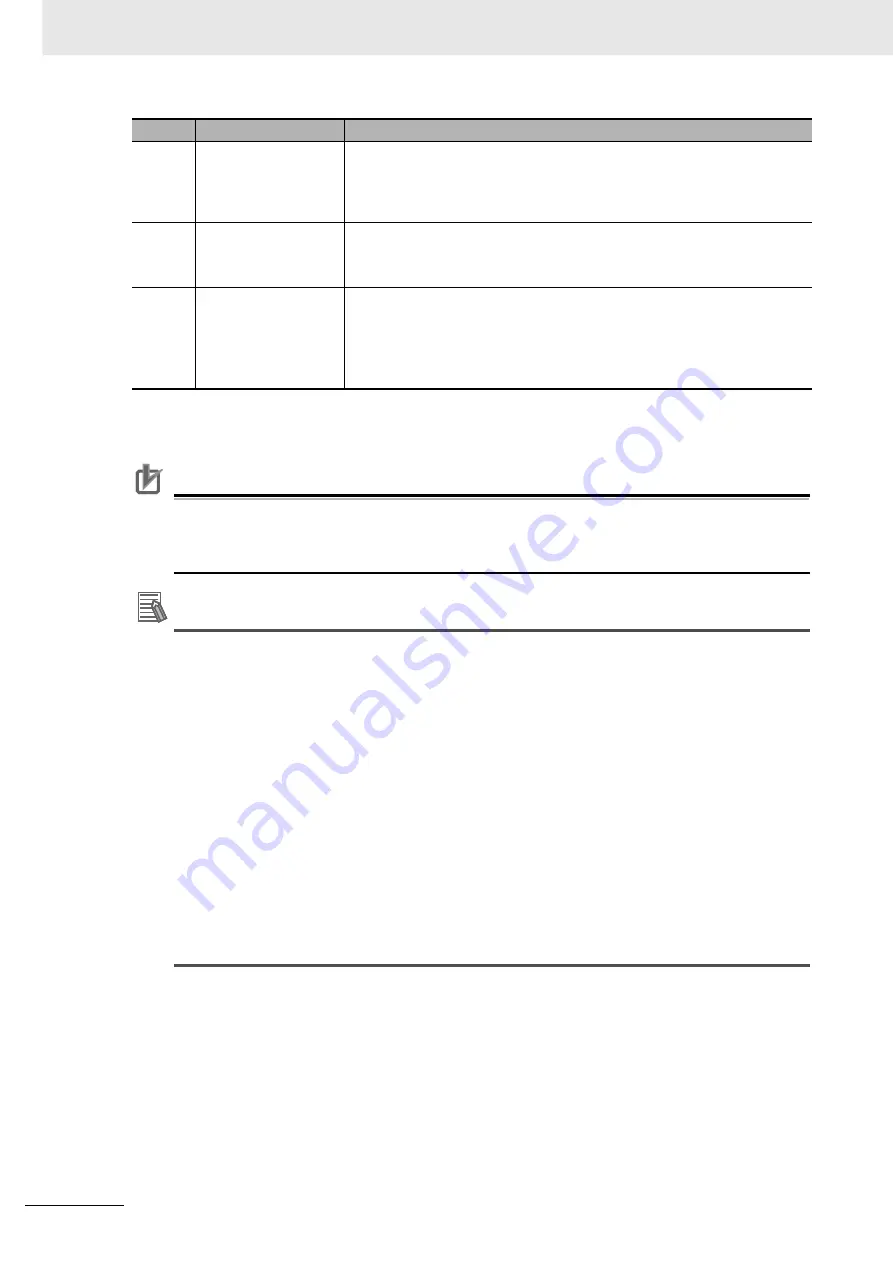
7
Rigidity setting
Select to enable or disable the basic gain setting by the Realtime Autotuning
Machine Rigidity Setting (3003 hex).
0: Disabled
1: Enabled
8
Fixed object settings
Select whether to allow changes to the objects that normally are fixed.
0: Use the present set value.
1: Set to fixed values.
9 to 10
Gain switch setting
Select the method to set the objects that relate to gain switching while the
realtime autotuning is enabled.
0: Use the present set value.
1: Disable gain switching.
2: Enable gain switching.
Bit
Name
Description
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































