





























7 Applied Functions
7 - 20
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
7-6
Electronic Gear Function
This function controls the position by using the value multiplied the position command entered on the
Host Controller by the preset electronic gear ratio. The functions is supported only in the Position
Control when the communications cycle is 1, 2, or 4 ms.
For communications cycles for which the electronic gear is not supported (250 or 500 µs), a Function
Setting Error (Error No. 93.4) will occur if the electronic gear is enabled.
Additional Information
When connected to an OMRON Machine Automation Controller (Model:
NJ301-
/NJ501-
) or Position Control Unit (Model: CJ1W-NC
81/
82), the
electronic gear ratio is set in the controller. Set the electronic gear ratio in the Servo Drive to 1:1.
*1
The electronic gear ratio must be set between 1/1,000 and 1,000. If it is set outside the range, an Object
Setting Error 1 (Error No. 93.0) will occur.
Whether the electronic gear is enabled/disabled is determined from the setting of the objects. If the gear ratio
setting is 1:1, the electronic gear is disabled.
Additional Information
To make the position command smoother after the electronic gear setting, adjust it by using the
Position Command Filter Time Constant (3222 hex) or by the Position Command FIR Filter Time
Constant (3818 hex).
7-6-1
Objects Requiring Settings
Index
Sub-index
Name
Description
Reference
6091 hex
01 hex
Motor revolutions
*1
Set the numerator of the electronic gear
ratio.
02 hex
Shaft revolutions
*1
Set the denominator of the electronic gear
ratio.
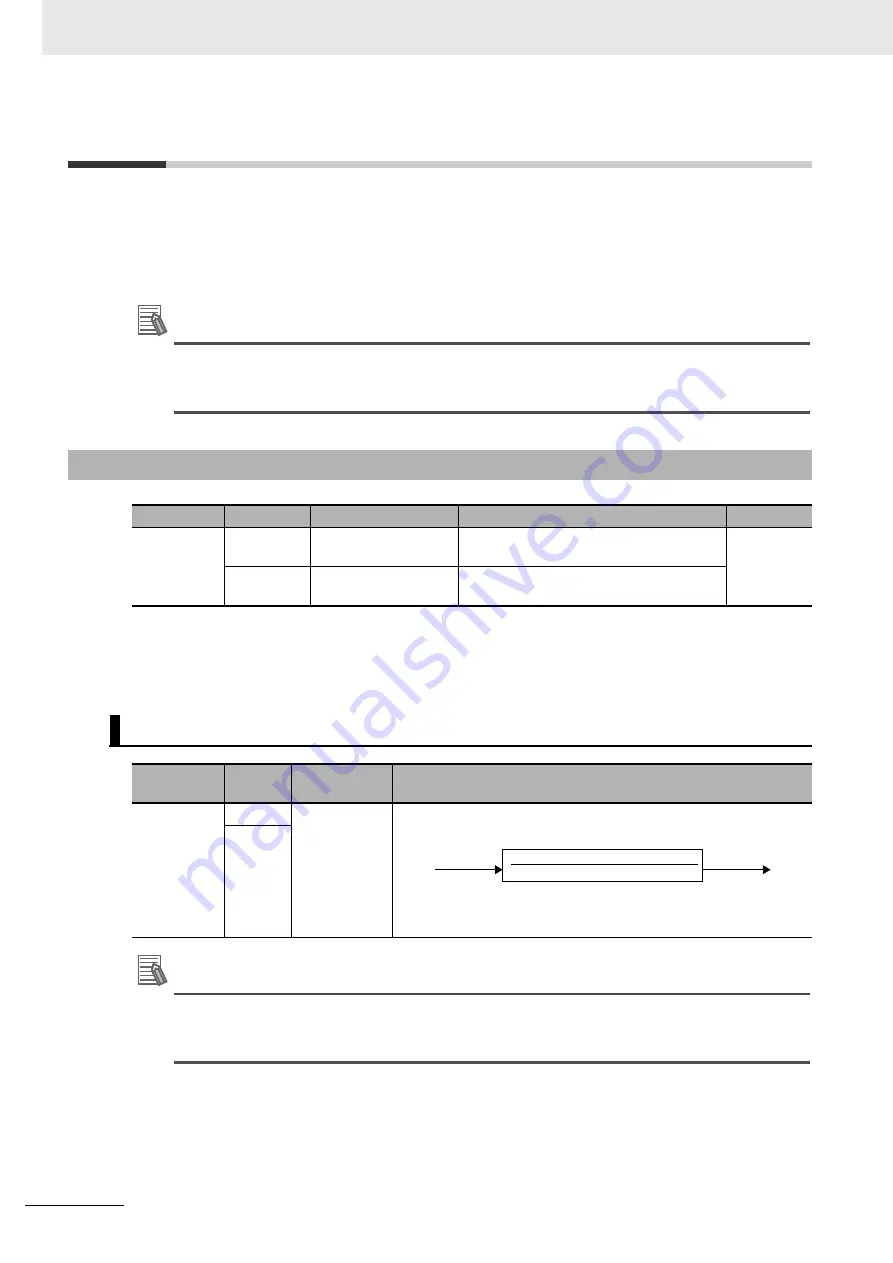
Gear ratio Setting (6091-01 and 6091-02 hex)
Index
Sub-
index
Setting range
Description
6091 hex
01 hex
1 to
1,073,741,824
The processing changes with the set values of Motor revolutions
(6091-01 hex) and Shaft revolutions (6091-02 hex).
Position command = Motor revolutions (6091-01 hex) /
Shaft revolutions (6091-02 hex)
02 hex
Position
command
Motor revolutions (6091-01 hex)
Shaft revolutions (6091-02 hex)
Position
command
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































