





























11 Adjustment Functions
11 - 34
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
1
Set the Mass Ratio (3004 hex).
Set the Mass ratio as correctly as possible.
In the Mass Ratio (3004 hex), use the estimated value obtained during realtime autotuning or
set the mass ratio calculated from the machine specifications.
2
Set the Force Feed-forward Command Filter (3113 hex).
Set the Force Feed-forward Command Filter (3113 hex) to approximately 50 (0.5 ms).
3
Gradually increase the value of the Force Feed-forward Gain (3112 hex).
By increasing the Force Feed-forward Gain (3112 hex) value little by little, it is possible to reduce
the Following Error Actual Value during acceleration/deceleration at a constant speed to close to
0. This enables the Following Error Actual Value to be controlled to almost 0 throughout the
entire operation range during a trapezoidal speed pattern under ideal conditions where no
disturbance torque is working.
In reality, disturbance force is always applied and therefore the Following Error Actual Value
cannot be completely “0.”
Force feed-forward can reduce the Following Error Actual Value in a range of constant
acceleration/deceleration.
Precautions for Correct Use
Precautions for Correct Use
•
If you increase the Force Feed-forward Command Filter time constant, the operation noise will
be reduced. However, the Following Error Actual Value where the acceleration changes will
become larger.
•
If the the external encoder resolution is low, or if the command refresh period of host controller
is long, the Force Feed-forward output will contain a large amount of noise. In this case,
increase the value set for the Force Feed-forward Command Filter (3113 hex).
•
The force feed-forward function cannot be used when realtime autotuning is being used. Set
both the Force Feed-forward Gain (3112 hex) and Force Feed-forward Command Filter
(3113 hex) to 0.
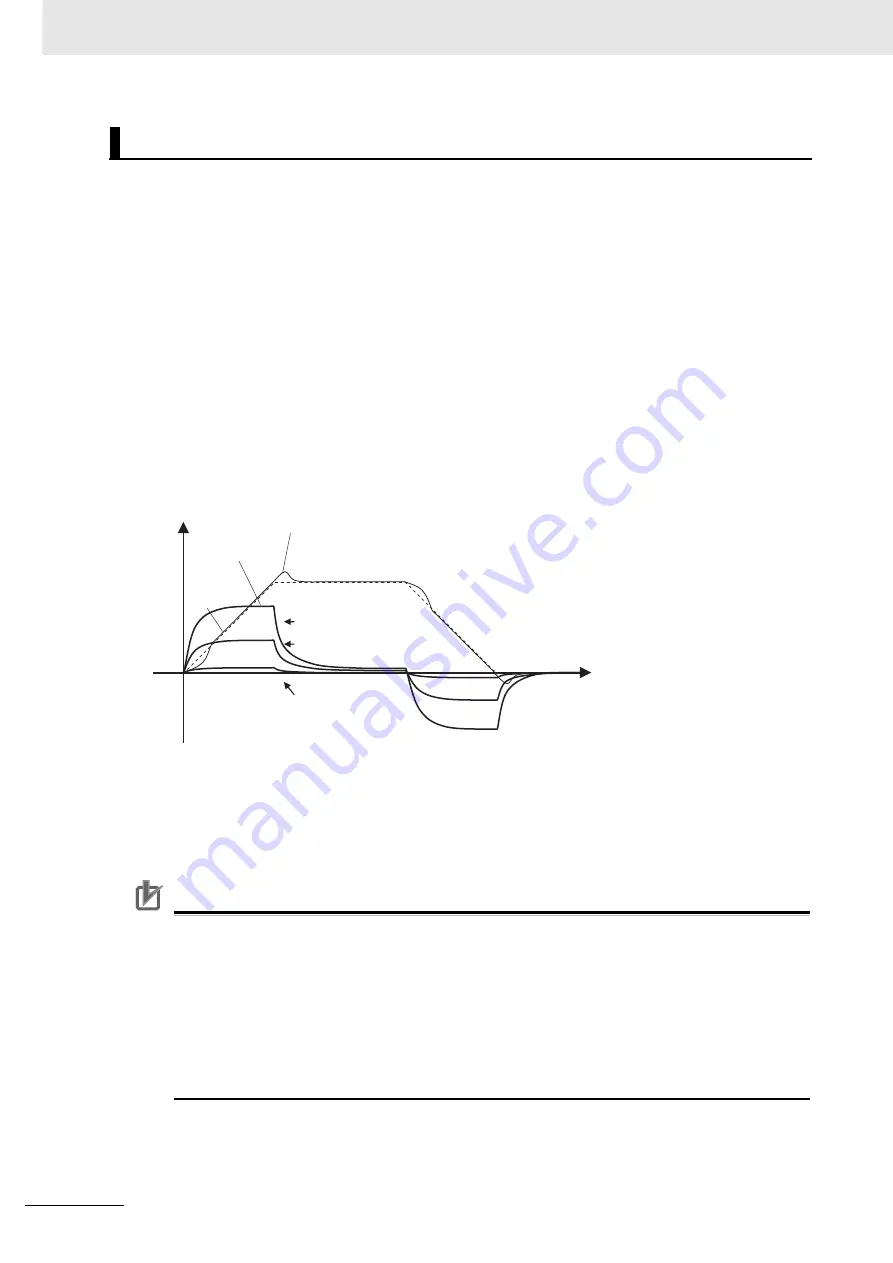
Force Feed-forward Operating Method
50 [%]
100 [%]
0 [%]
Time
Force
Feed-forward Gain
Command
speed
Motor speed
Following error
actual value
Speed Feed-forward Gain = 100 [%] (fixed)
Содержание R88D-KN01H-ECT-L
Страница 136: ...3 Specifications 3 60 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 190: ...4 System Design 4 54 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 208: ...5 EtherCAT Communications 5 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 226: ...6 Basic Control Functions 6 18 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 268: ...7 Applied Functions 7 42 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 276: ...8 Safety Function 8 8 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 616: ...Appendices A 170 G5 series Linear Motors Servo Drives With Built in EtherCAT Communications...
Страница 617: ...Index 1 I G5 series Linear Motors Servo Drives With Built in EtherCAT Communications Index...
Страница 624: ......
Страница 625: ......







































































