





























2
Features
Section 1-1
1-1
Features
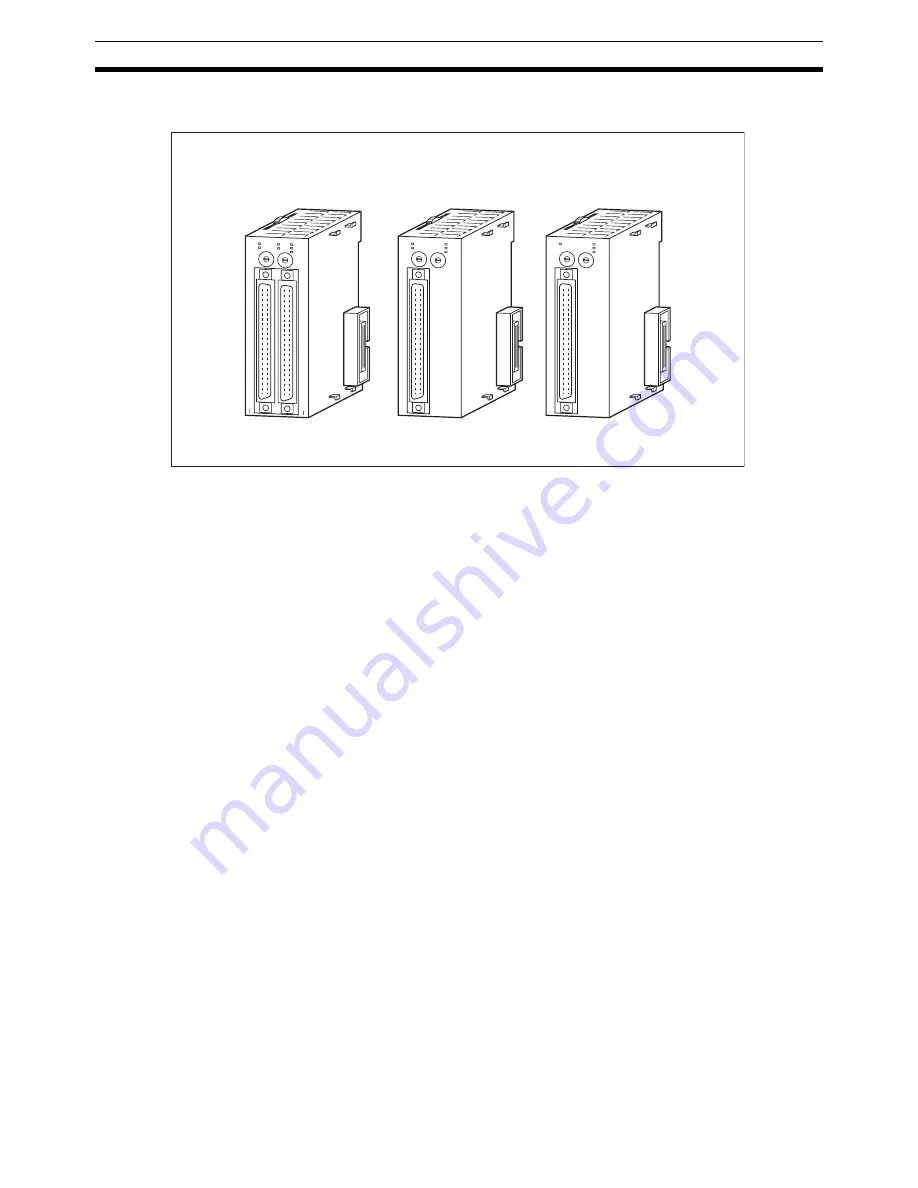
These Position Control Units are CJ-series Special I/O Units. The Units
receive instructions from the Programming Controller’s Work Area and output
pulse trains to various motor drivers for positioning.
1-1-1
Functions
High-speed Response
The Position Control Unit (PCU) responds to instructions from the CPU Unit
within 2 ms. (For more details on the conditions required, refer to
Appendix A
Performance Characteristics
.)
Memory Operation and
Direct Operation
There are two different control methods. The first is memory operation, in
which the data required for positioning is transferred to the PCU and then
specified for position control, and the second is direct operation, in which the
target position and target speed are set each time from the CPU Unit.
Number of Control Axes
and Output Type
The PCU is available with 1, 2, or 4 control axes. With 2-axis and 4-axis mod-
els, linear interpolation is possible for all axes. Either open collector output or
line driver output is available for any number of control axes. Choose the most
appropriate model according to the number of controlled axes and the desired
output type.
Motor Driver Selectable by
Axis
A stepping motor driver and a pulse train input type Servo Drive can be con-
nected to the PCU. It is possible to set different operating modes for different
axes allowing the combined use of different types of motor driver.
Interrupt Feeding
When an interrupt is input during pulse output, positioning is continued for
only a specified amount and then stopped.
Position and Speed
Control Ranges
Positioning can be performed for positions in the range –1,073,741,823 to
1,073,741,823 pulses and speeds in the range 1 to 500,000 pps in 1-pulse
units. This means that positioning is possible over a wide range with speed
precision.
NC413
NC213
NC113
0
12
34
5
67
89
0
12
34
5
67
89
RUN
ERC
ERH
Z
U
X
Y
MACH
No.
10
1
10
0
20
1
1
20
YX
U Z
CN1
CN2
0
12
34
5
67
89
0
12
34
5
67
89
RUN
ERC
ERH
X
Y
MACH
No.
10
1
10
0
20
1
1
20
Y
X
CN1
0
12
34
5
67
89
0
12
34
5
67
89
RUN
ERC
ERH
X
MACH
No.
10
1
10
0
20
1
1
20
X
CN1
Position Control Unit
CJ1W-NC4
@
3
(4-axis control)
CJ1W-NC2
@
3
(2-axis control)
CJ1W-NC1
@
3
(1-axis control)
Содержание CJ1W-C113 - REV 02-2008
Страница 1: ...Position Control Units Cat No W397 E1 07 SYSMAC CJ1W NC113 213 413 133 233 433 OPERATION MANUAL ...
Страница 2: ...CJ1W NC113 213 413 133 233 433 Position Control Units Operation Manual Revised February 2008 ...
Страница 3: ...iv ...
Страница 13: ...xiv ...
Страница 15: ...xvi ...
Страница 19: ...xx ...
Страница 27: ...xxviii Conformance to EC Directives 6 ...
Страница 43: ...16 Control System Principles Section 1 7 ...
Страница 47: ...20 Basic Procedures Section 2 ...
Страница 139: ...112 Examples of Parameter Settings Section 4 9 ...
Страница 173: ...146 Transferring Data with CX Position Section 5 7 ...
Страница 223: ...196 Sample Program Section 7 7 ...
Страница 259: ...232 Sample Program Section 8 10 ...
Страница 293: ...266 Easy Backup Function Ver 2 0 or later Section 9 11 ...
Страница 369: ...342 Reading Error Information with CX Position Section 11 8 ...
Страница 385: ...358 Common Parameter Area Appendix C ...
Страница 399: ...372 Parameter Coding Sheets Appendix E ...







































































