





























Part 3: Review on Replacement of MR-J3-_B_ with MR-J4-_B_
3 - 19
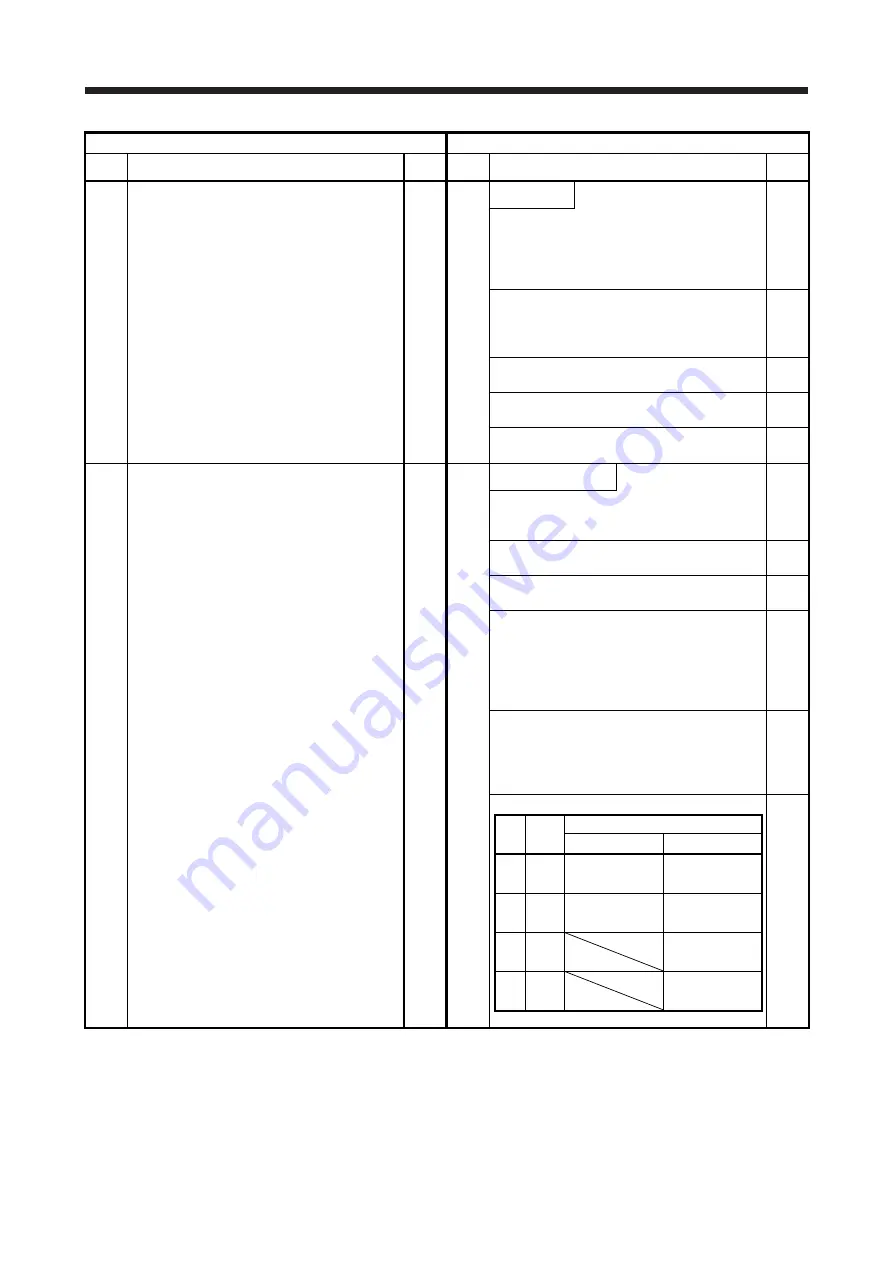
MR-J3-_B_
MR-J4-_B_
No.
Name and function
Initial
value
No.
Name and function
Initial
value
PA03
Absolute position detection system
This parameter is made valid when power is switched
off, then on after setting, or when the controller reset has
been performed.
This parameter cannot be used in the speed control
mode.
Set this parameter when using the absolute position
detection system in the position control mode.
0 0 0 x:
Selection of absolute position detection system
0: Used in incremental system
1: Used in absolute position detection system
0000h
PA03
Same as MR-J3
Absolute position detection system
Set this parameter when using the absolute position
detection system.
The parameter is not available in the speed control mode
and torque control mode.
_ _ _ x:
Absolute position detection system selection
0: Disabled (used in incremental system)
1: Enabled (used in absolute position detection system)
0h
_ _ x _ :
For manufacturer setting
0h
_ x _ _ :
For manufacturer setting
0h
x _ _ _ :
For manufacturer setting
0h
PA04
Function selection A-1
This parameter is made valid when power is switched
off, then on after setting, or when the controller reset has
been performed.
The servo forced stop function is avoidable.
0 x 0 0:
Selection of servo forced stop
0: Valid (Forced stop (EM1) is used
1: Invalid (Forced stop (EM1) is not used.)
When not using the forced stop (EM1) of servo amplifier,
set the selection of servo forced stop to Invalid (_ _1_).
At this time, the forced stop (EM1) automatically turns on
inside the servo amplifier.
0000h
PA04
Same setting as MR-J3
Function selection A-1
This is used to select the forced stop input and forced
stop deceleration function.
_ _ _ x:
For manufacturer setting
0h
_ _ x _ :
For manufacturer setting
0h
_ x _ _ :
Servo forced stop selection
0: Enabled (The forced stop input EM2 or EM1 is used.)
1: Disabled (The forced stop input EM2 and EM1 are not
used.)
Refer to table 3.1 for details.
0h
x _ _ _ :
Forced stop deceleration function selection
0: Forced stop deceleration function disabled (EM1)
2: Forced stop deceleration function enabled (EM2)
Refer to table 3.1 for details.
2h
Table 3.1 Deceleration method
Setting
value
EM2/EM1
Deceleration method
EM2 or EM1 is off
Controller forced stop is
enabled/Alarm occurred
0 0 _ _
EM1
MBR (Electromagnetic
brake interlock) turns off
without the forced stop
deceleration.
MBR (Electromagnetic
brake interlock) turns off
without the forced stop
deceleration.
2 0 _ _
EM2
MBR (Electromagnetic
brake interlock) turns off
after the forced stop
deceleration.
MBR (Electromagnetic
brake interlock) turns off
after the forced stop
deceleration.
0 1 _ _ Not using
EM2 and
EM1
MBR
(Electromagnetic
brake interlock) turns off
without the forced stop
deceleration.
2 1 _ _ Not using
EM2 and
EM1
MBR
(Electromagnetic
brake interlock) turns off
after the forced stop
deceleration.
Summary of Contents for Melservo MR-J3-100B
Page 17: ...8 MEMO ...
Page 18: ...Part 1 Summary of MR J3 MR J3W Replacement 1 1 Part 1 Summary of MR J3 MR J3W Replacement ...
Page 145: ...Part 3 Review on Replacement of MR J3 _B_ with MR J4 _B_ 3 48 MEMO ...
Page 195: ...Part 4 Replacement of MR J3W _B with MR J4W2 _B 4 50 MEMO ...
Page 277: ...Part 5 Review on Replacement of MR J3 DU_ with MR J4 DU_ 5 82 MEMO ...
Page 278: ...Part 6 Common Reference Material 6 1 Part 6 Common Reference Material ...
Page 418: ...Part 7 Review on Replacement of Motor 7 1 Part 7 Review on Replacement of Motor ...
Page 564: ...Part 9 Startup Procedure Manual 9 1 Part 9 Startup Procedure Manual ...
Page 567: ...Part 9 Startup Procedure Manual 9 4 MEMO ...
Page 589: ...L NA 03127ENG C ...







































































