





























MPH-02, MPB-02, MPD-02
Motor, Mechanical Axis System, Measuring Systems
5-67
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
At a defined position the actual position value of the encoder to be homed
is written with the corresponding absolute value of the axis (see also
"Establishing the Position Data Reference: Establishing Position Data
Reference for Relative Measuring Systems" in chapter "Drive Functions").
•
S-0-0165, Distance-coded reference offset A
•
S-0-0166, Distance-coded reference offset B
•
S-0-0277, Position feedback 1 type
•
S-0-0115, Position feedback 2 type
•
P-0-0019, Initial position value
Hardware Requirements
For the signal specification for position and homing signals with regard to
amplitude and phase position, please see the Project Planning Manual for
the control section.
Functional Description
When the drive is switched on the actual position values of relative
encoders are written with the initial position value (P-0-0019), if none of
the encoders is an absolute value encoder that has already been set in
reference.
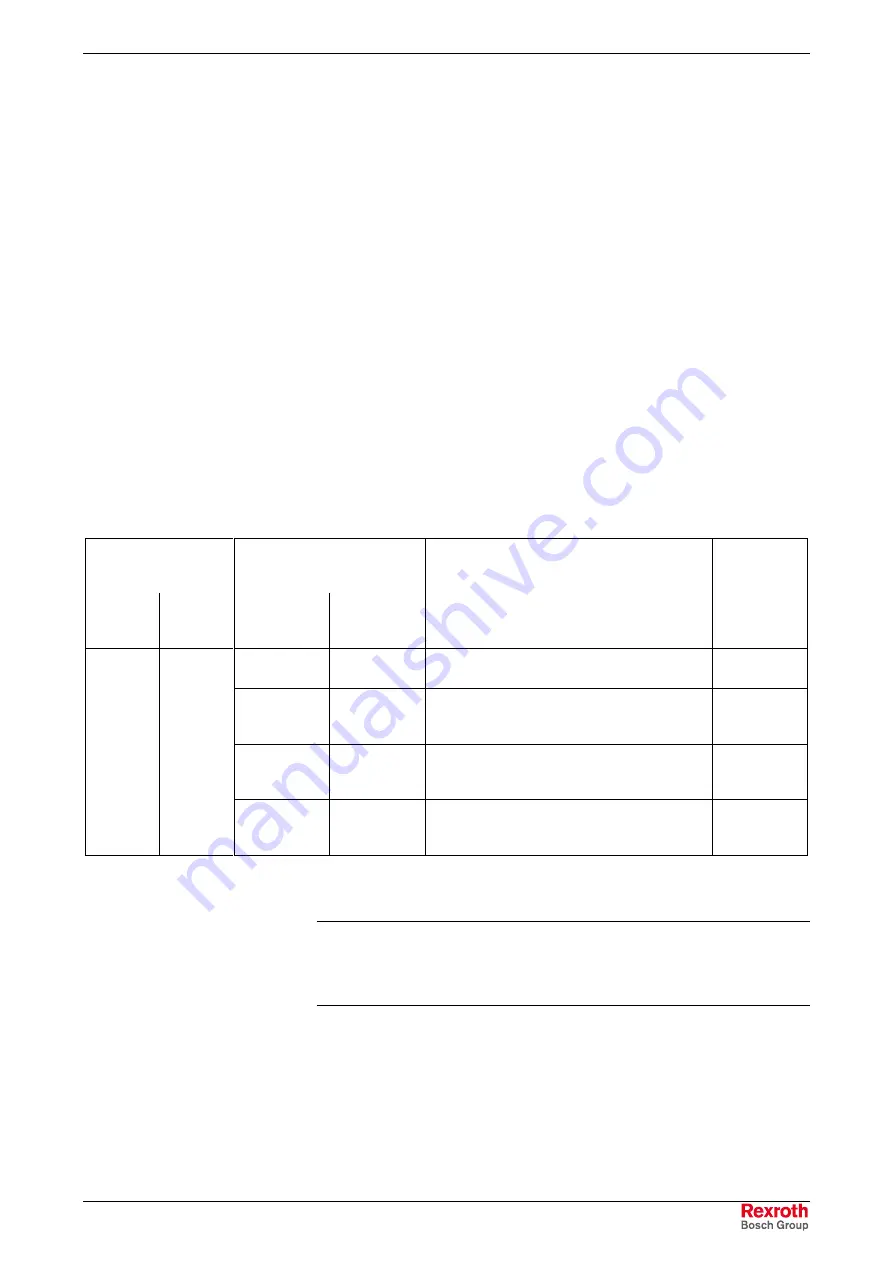
Absolute evaluation
possible?
Actual position values
when switching on
Current
position
status
Motor
encoder
External
encoder
Motor
encoder
(S-0-0051)
External
encoder
(S-0-0053)
Notes on the operating status
(S-0-0403,
bit 0..2)
no
no
P-0-0019
P-0-0019
Axis has not moved after switching on, axis
has not yet been homed.
0b … 000
absolute
value motor
encoder
absolute
value motor
encoder
Axis was homed via motor encoder; at the
home point, S-0-0053 is set to the value of
S-0-0051.
0b … 01x
absolute
value ext.
encoder
absolute
value ext.
encoder
Axis was homed via external encoder; at the
home point, S-0-0051 is set to the value of
S-0-0053.
0b … 10x
absolute
value motor
encoder
absolute
value ext.
encoder
Axis was homed via motor encoder and
external encoder.
0b … 111
Fig. 5-79:
Actual position values after switching on resp. after homing (drive
with exclusively relative encoders)
Note:
The
S-0-0403, Position feedback value status
parameter
displays whether the encoders connected to the drive and the
reference encoder selected via
S-0-0147, Homing parameter
are in reference.
In order to establish the axis-related absolute distance ("reference") the
controller monitors the signals of the relative encoder or of the axis
sensors that contain absolute position information regarding the axis:
•
reference marks of the encoder, if necessary in combination with
home point switch of the axis
•
distance-coded reference marks of the encoder
•
home point switch of the axis
Pertinent Parameters
Signal Specification for Position
and Homing Signals
Initial position value
Reference Marks
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































