





























7-74
Operating Modes
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
v
XXX
02
01
01
DK000039v01_en.fh7
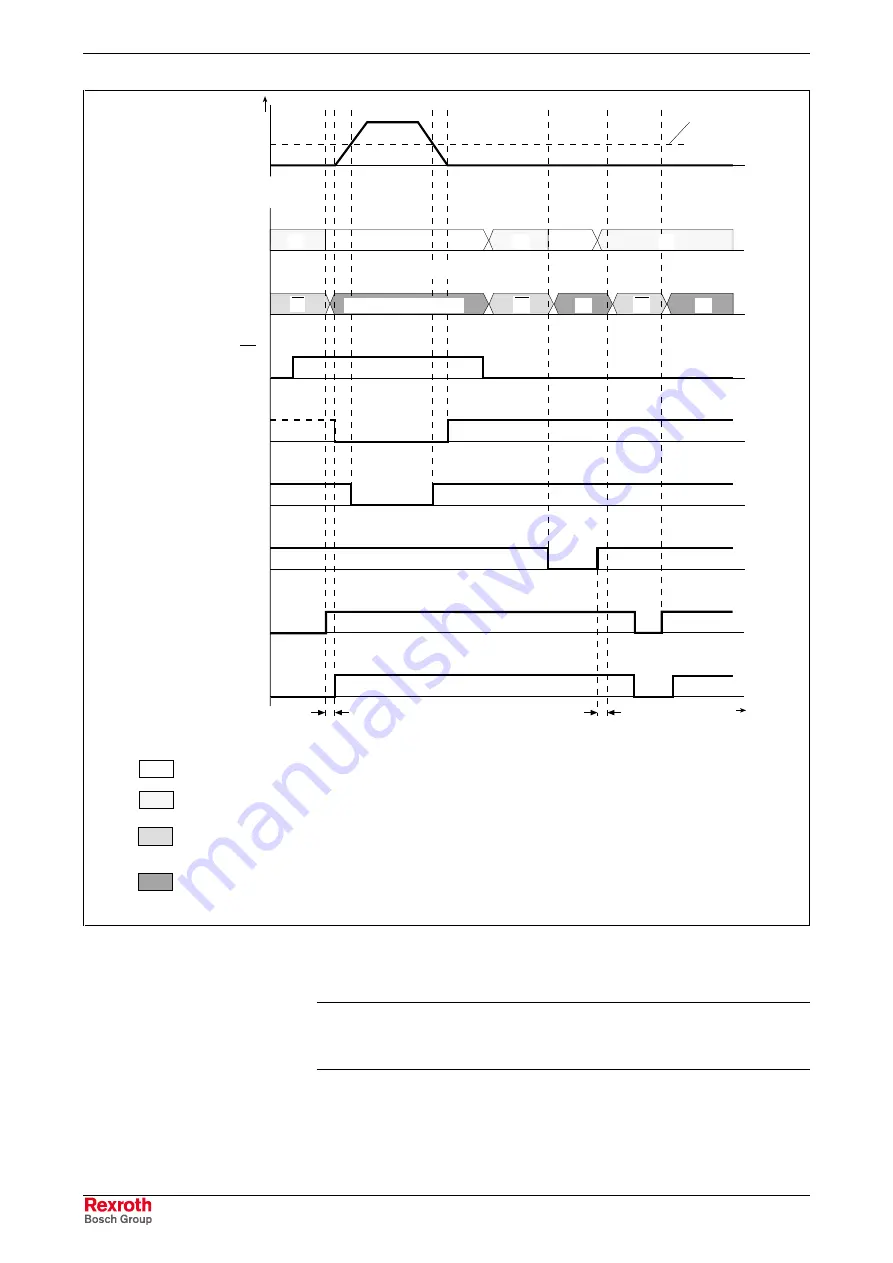
positioning block
acceptance:
P-0-4060 (bit 0)
t
in standstill:
S-0-0013,
Class 3
diagnostics (bit 1)
S-0-0419,
Positioning command
acknowledge
end position reached:
P-0-4061,
Positioning block
status word (bit 4)
P-0-4051,
Positioning block
acknowledgment
P-0-4026,
Positioning block
selection
velocity
profile
S-0-0124,
Standstill
window
status of positive inputs irrelevant
positioning inputs valid
positioning acknowledgment outputs show negated status
of positioning inputs
after valid block acceptance, positioning acknowledgment outputs
show non-inverted status of positioning inputs
01
t
R
XXX
positioning block 01
drive enable:
S-0-0134,
Master
control word (bit 15)
01
positioning block 01
XXX
01
01
01
t
2
Drive HALT (AH):
S-0-0134,
Master control
word (bit 13)
Fig. 7-44:
Acknowledge and message "end position reached" after drive enable
switched off
Note:
According to master communication, positioning block
acceptance takes place by toggling bit 0 in S-0-0346 or by a 0-
1 edge of bit 0 in P-0-4060.
If the control voltage is switched off, the last accepted positioning block is
stored in parameter
P-0-4052, Positioning block, last accepted
so that
after switching control voltage on, it is always the last accepted positioning
block that is output.
Acknowledge with Control
Voltage Interrupted
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































