





























4-30
Master Communication
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
Drive-Controlled Positioning
•
"Drive-controlled positioning, encoder 1, lagless" must have been set
as the primary mode of operation in parameter S-0-0032 (see also
"Drive-Controlled Positioning" in chapter "Operating Modes").
•
The Rexroth-specific definitions for the field bus control and status
words are applying (also see section "Freely Configurable Mode
(Rexroth Profile Type)").
•
By configuring the content of
S-0-0282,
Positioning command value
as a cyclic command value, bits 0, 3, 4 in
P-0-4077, Field bus control
word
can be used to directly switch between relative to absolute
positioning (functionally compatible with position target setting).
•
In this configuration a drive functionality is achieved which
corresponds to the position target setting of DRIVECOM (functionally
compatible).
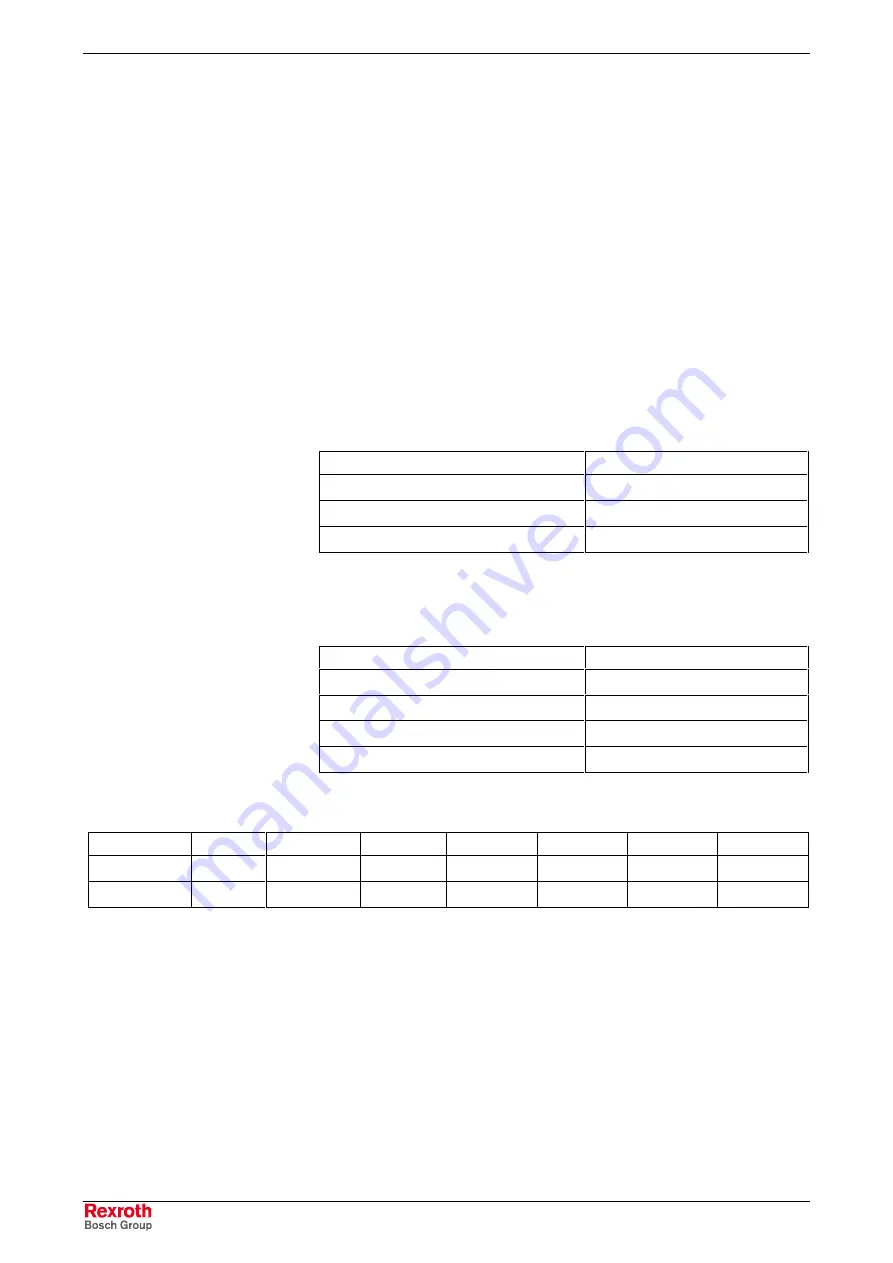
In the real-time channel of the field bus the positioning data configured in
P-0-4081, Field bus: config. list of cyclic command value data ch.
are
transmitted from master to drive:
Parameters
Format
P-0-4077, Field bus: control word
u16 (1 word)
S-0-0282, Positioning command value
i32 (2 words)
S-0-0259, Positioning Velocity
i32 (2 words)
In the real-time channel of the field bus the positioning data configured in
P-0-4080, Field bus: config. list of cyclic actual value data ch.
are
transmitted from drive to master:
Parameters
Format
P-0-4078, Field bus: status word
u16 (1 word)
S-0-0051, Position feedback 1 value
i32 (2 words)
S-0-0040, Velocity feedback value
i32 (2 words)
S-0-0390, Diagnostic message number
u32 (2 words)
Content and Order of Data in Real-Time Channel:
Data direction
Word1
Word2
Word3
Word4
Word5
Word6
Word7
master
→
slave P-0-4077
S-0-0282 (H)
S-0-0282 (L) S-0-0259 (H) S-0-0259 (L)
slave
→
master P-0-4078
S-0-0051 (H)
S-0-0051 (L) S-0-0040 (H) S-0-0040 (L)
S-0-0390 (H) S-0-0390 (L)
Using the Signal Control Word and Status Word
By using the parameters
S-0-0145, Signal control word
and
S-0-0144,
Signal status word
the user has the option to freely configure control
and status bits in the drive which are transmitted in addition to the field
bus control word and field bus status word in real time via the field bus.
See also "Configurable Signal Control Word" and "Configurable Signal
Status Word" in section "Possibilities of Control/Additional Functions"
•
By using the parameters S-0-0144 and S-0-0145 there are 16 more
freely configurable control and status bits available.
Features/Settings
Structure of Real-Time Channel
Master
→
Slave
Structure of Real-Time Channel
Slave
→
Master
Features
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































