





























7-92
Operating Modes
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
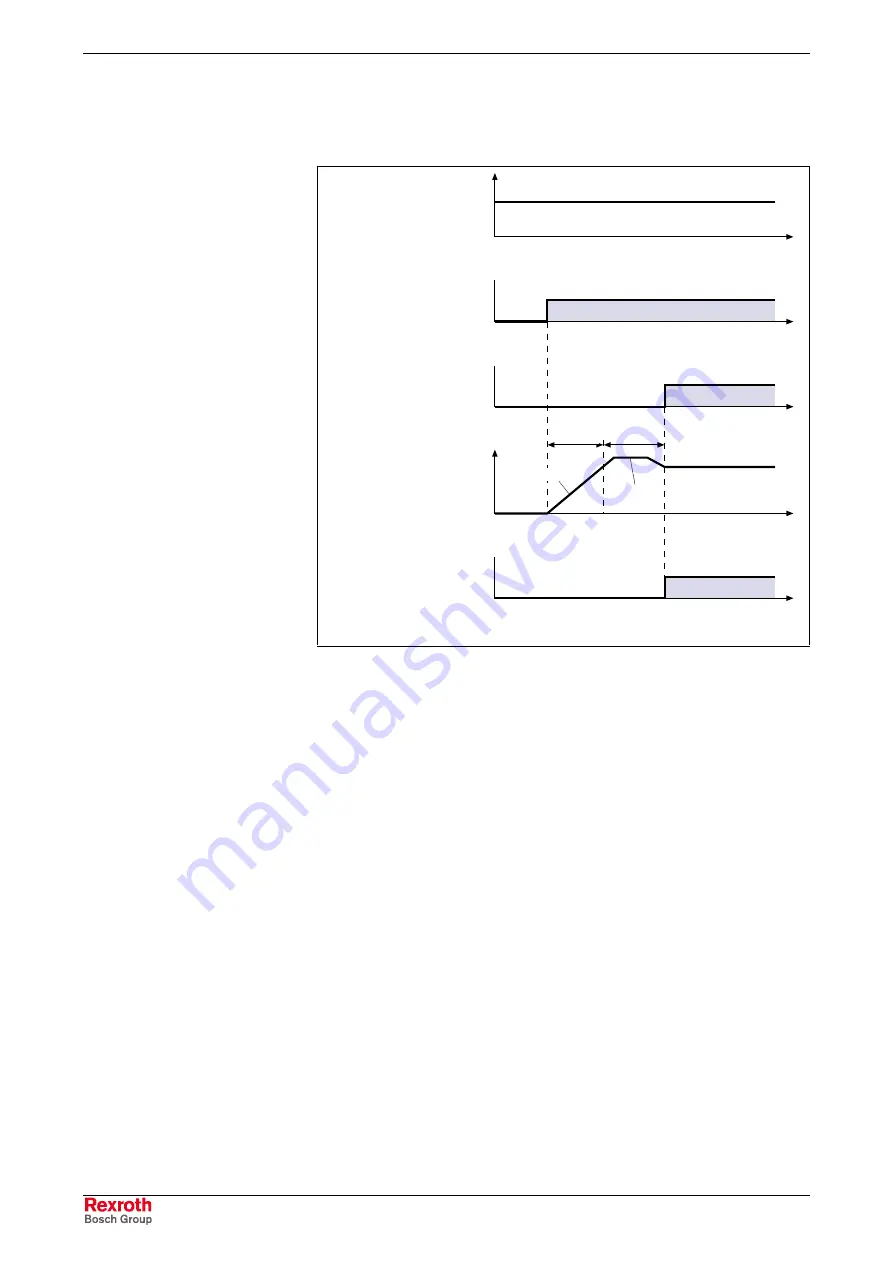
The figure below illustrates the absolute synchronization to a virtual
master axis, the master axis having a velocity
≠
0 when the operating
mode is activated.
DK000044v01_en.fh7
t
t
0
0
t
master axis
velocity
0
velocity
of slave axis
operating mode
activated
1
t
0
1
0
P-0-0142
t
0
1
synchronous oper. mode
in synchronization
(P-0-0089, bit 8)
step 1
step 2
P-0-0143
synchronization
completed
(P-0-0152, bit 0)
step 1:
velocity adjustment
step 2:
position adjustment
Fig. 7-71:
Example: absolute synchronization in running operation
•
When the operating mode is activated, the master axis moves at
constant velocity.
•
The synchronization status signals "synchronization running"
(P-0-0152, bit 0 = 0).
•
Based on its current position the slave axis accelerates to the
synchronous velocity. While doing this the synchronization
acceleration (P-0-0142) is effective.
•
After velocity adjustment the absolute position reference is
established. Position adjustment takes place with parameterized
synchronization acceleration (P-0-0142) and synchronization velocity
(P-0-0143).
•
As soon as the position difference between master axis and slave axis
is smaller than the "position synchronization window" (S-0-0228), the
status bit "slave axis has been synchronized" (P-0-0089, bit 8 = 1) is
output.
Bit 0 is set in parameter P-0-0152 when synchronization has been
completed.
Absolute Synchronization in
Running Operation
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































