





























MPH-02, MPB-02, MPD-02
Drive Control
6-9
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
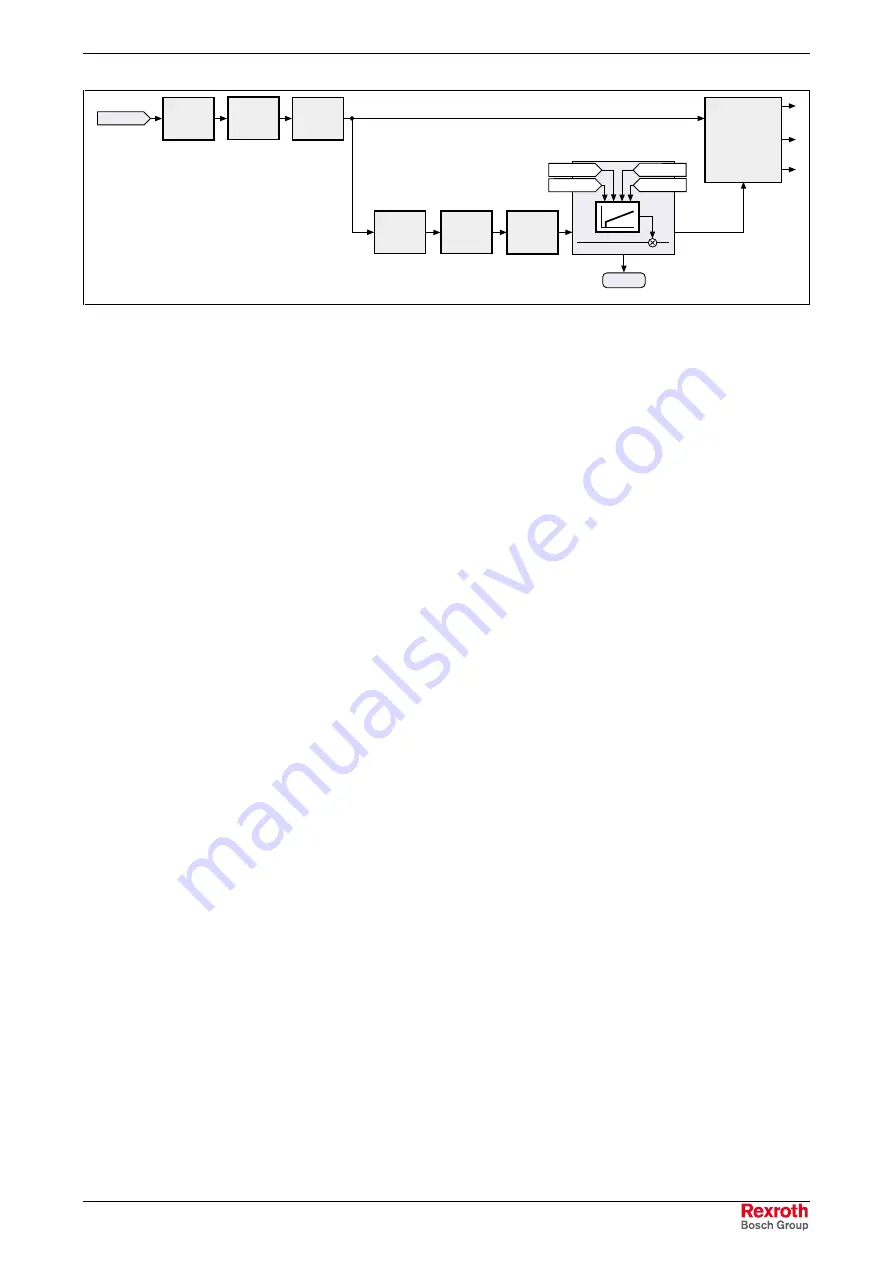
P-0-0048
S-0-0107
S-0-0106
P-0-4040
P-0-4046
DF000120v01_en.fh7
current
commutation
and PWM
f
out
monitoring
slip
compen-
sation
U/f
charac-
teristic
IxR
boost
oscilla-
tion
damping
current limitation
loop
E8041
stall pro-
tection
loop
S-0-0106:
current loop proportional gain 1
S-0-0107:
current loop integral action time 1
P-0-0048:
effective velocity command value
P-0-4040:
rotor leakage inductance
P-0-4046:
effective peak current
Fig. 6-11:
Core function "current limitation loop"
The velocity search mode is selected and activated in parameter
P-0-0045, Control word of current controller
(bits 8, 9).
The following modes are distinguished for velocity search:
•
Velocity search after drive enable
After the start the search is run up to a speed equal zero with
S-0-0091, Bipolar velocity limit value
in the rotational direction given
by
S-0-0036, Velocity command value
. At the current speed of the
coasting machine, but at the latest at speed = 0, the search mode
function is completed and the normal command value processing
starts. In normal command value processing the drive moves to the
provided command value with the initialization encoder.
•
Velocity search after drive enable, bidirectional
After the start the search is run up to a speed equal zero with
S-0-0091, Bipolar velocity limit value
in the rotational direction given
by
S-0-0036, Velocity command value
. If the speed of the machine
has not been found up to speed = 0, there is another search with the
rotational direction changed. At the current speed of the coasting
machine or at the latest at speed = 0, the search mode function is
completed and the normal command value processing starts. In
normal command value processing the drive moves to the provided
command value with the initialization encoder.
During the search process the current given by
P-0-0575, Search mode:
search current factor
is generated. It is defined as the percentage value
of the magnetizing current (P-0-4004).
As soon as the machine has been found the rated slip is added to the
speed at the "finding point". 100% are corresponding to the rated slip of
the machine. This added value is subsequently trimmed with
P-0-0576,
Search mode: finding point slip factor
.
Diagnostic and Status Messages
The limit value for the maximum change of velocity with which the drive
can follow the command values is set in parameter
P-0-0569, Maximum
stator frequency change
.
When the limitation of the maximum stator frequency change takes effect,
the diagnostic message
E8260 Torque/force command value limit
active
. As soon as the stator can follow the required frequency change
again, the message is reset.
Velocity Search Mode
Monitoring the Stator Frequency
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































