





























MPH-02, MPB-02, MPD-02
Drive Control
6-39
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
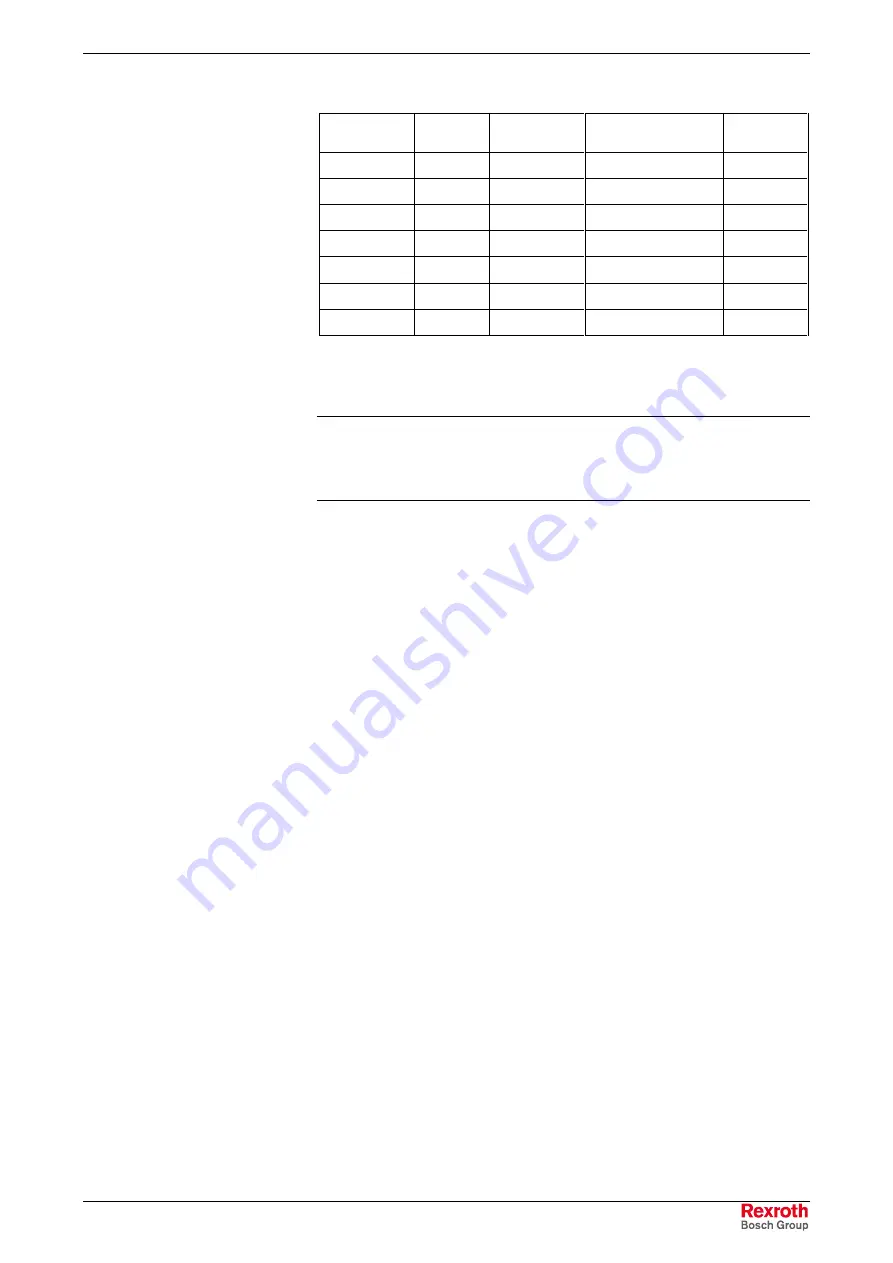
The following cycle times and PWM frequencies can be set:
P-0-0556
(bit 2)
P-0-0001
TA_position
loop
TA_velocity loop
TA_current
loop
0 (Basic)
16 kHz
500
µ
s
250
µ
s
62.5
µ
s
0
12 kHz
500
µ
s
250
µ
s
83.3
µ
s
0
8 kHz
500
µ
s
250
µ
s
125.0
µ
s
0
4 kHz
500
µ
s
250
µ
s
125.0
µ
s
1
(Advanced)
16 kHz
250
µ
s
125
µ
s
62.5
µ
s
1
8 kHz
250
µ
s
125
µ
s
62.5
µ
s
1
4 kHz
250
µ
s
125
µ
s
125.0
µ
s
TA:
sampling time
Fig. 6-26:
Possible control cycle times in accordance with controller
performance and switching frequency that have been set
Note:
We distinguish between basic and advanced control.
Advanced control could take place, for example, with
8 kHz/16 kHz switching frequency, 62.5 µs current loop clock,
125 µs velocity loop clock and 250 µs position loop clock.
•
Jerk limitation in the "cyclic position control" mode by introducing the
S-0-0349, Jerk limit bipolar
parameter. The filter degree of the
smoothing filter (moving average) can be set in parameter
P-0-0042,
Current position command average value filter order
.
•
velocity feedforward to be set, i.e. the feedforward degree can be set
via parameter
P-0-0040, Velocity feedforward evaluation
(0 % … 100 %)
•
input value for parameter
S-0-0348, Acceleration feedforward gain
can directly be the respective inertia in kg*m
2
(for rotary motor) or the
mass in kg (for linear motor)
•
Standardization of the output value at the velocity loop to Newton (N)
or Newton meter (Nm). According to the motor type, there are the
following units for parameter S-0-0100 for IndraDrive:
•
rotary
motor
→
Nm * s / rad
•
linear
motor
→
N * min / mm
•
Extending the possibilities for filtering resonance frequencies. There
are 4 filters of 2
nd
degree available that can be set via the parameters
P-0-1120, P-0-1121, P-0-1122 and P-0-1123.
•
limiting the acceleration in velocity control by setting in parameter
S-0-0138, Bipolar acceleration limit value
Possibilities of Accessing Outer Control Loops
It is possible to access the outer control loops when operating in a higher-
level mode. Depending on the basic operating mode, the following
parameters are available to do this.
In position control:
•
S-0-0037, Additive velocity command value
•
S-0-0048, Additive position command value
•
S-0-0081, Additive torque/force command value
Position Loop
Velocity Loop
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































