





























8-38
Drive Functions
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
1
0
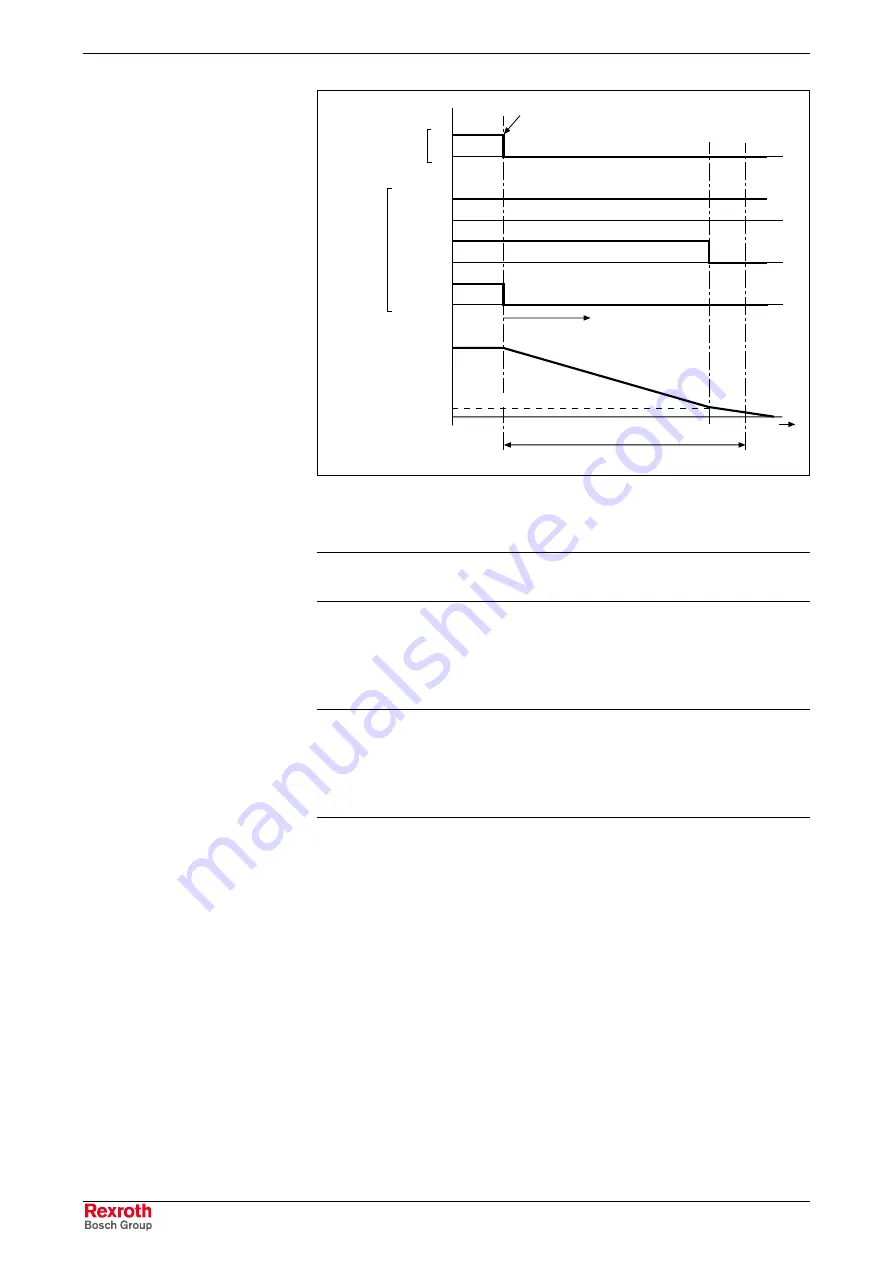
(AF internal)
DK000015v01_en.fh7
bit 3: 1
0
P-0-0115
bit 14: 1
0
bit 15: 1
0
AF from NC
AF reset by NC or error with "velocity command
value reset" error reaction, for example
drive disables NC command values
velocity
command value
S-0-0273
10 min
-1
or 10 mm/min
t
S-0-0273:
maximum drive off delay time
P-0-0115:
device control: status word
Fig. 8-25:
Time flow of velocity command value set to zero
Note:
If the value entered for S-0-0273 is too small, the error
reaction is sometimes aborted without axis standstill!
The sequence of the error reaction with motor holding brake available and
of the output stage release with velocity command value reset is
described under "Motor Holding Brake: Error Situation 1 in chapter
"Motor, Mechanical Axis System, Measuring Systems".
Note:
The activation and function of the motor holding brake
depends on the setting in parameter
P-0-0525, Holding brake
control word
.
See Parameter Description "P-0-0525, Holding brake control
word"
See also "General Information on the Operation of Motors with IndraDrive:
Motor Holding Brake" in chapter "Motor, Mechanical Axis System,
Measuring Systems"
Velocity Command Value Reset with Filter and Ramp
("Quick Stop")
In the case of error
•
the closed-loop-controlled servo drive in velocity control
- or -
•
the open-loop-controlled drive in U/f operation
is decelerated to the final value "0" with a command value ramp and a
jerk-limiting command value smoothing filter.
Sequence of Error Reaction with
Motor Holding Brake Available
P-0-0119 = 2
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































