





























6-24
Drive Control
MPH-02, MPB-02, MPD-02
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
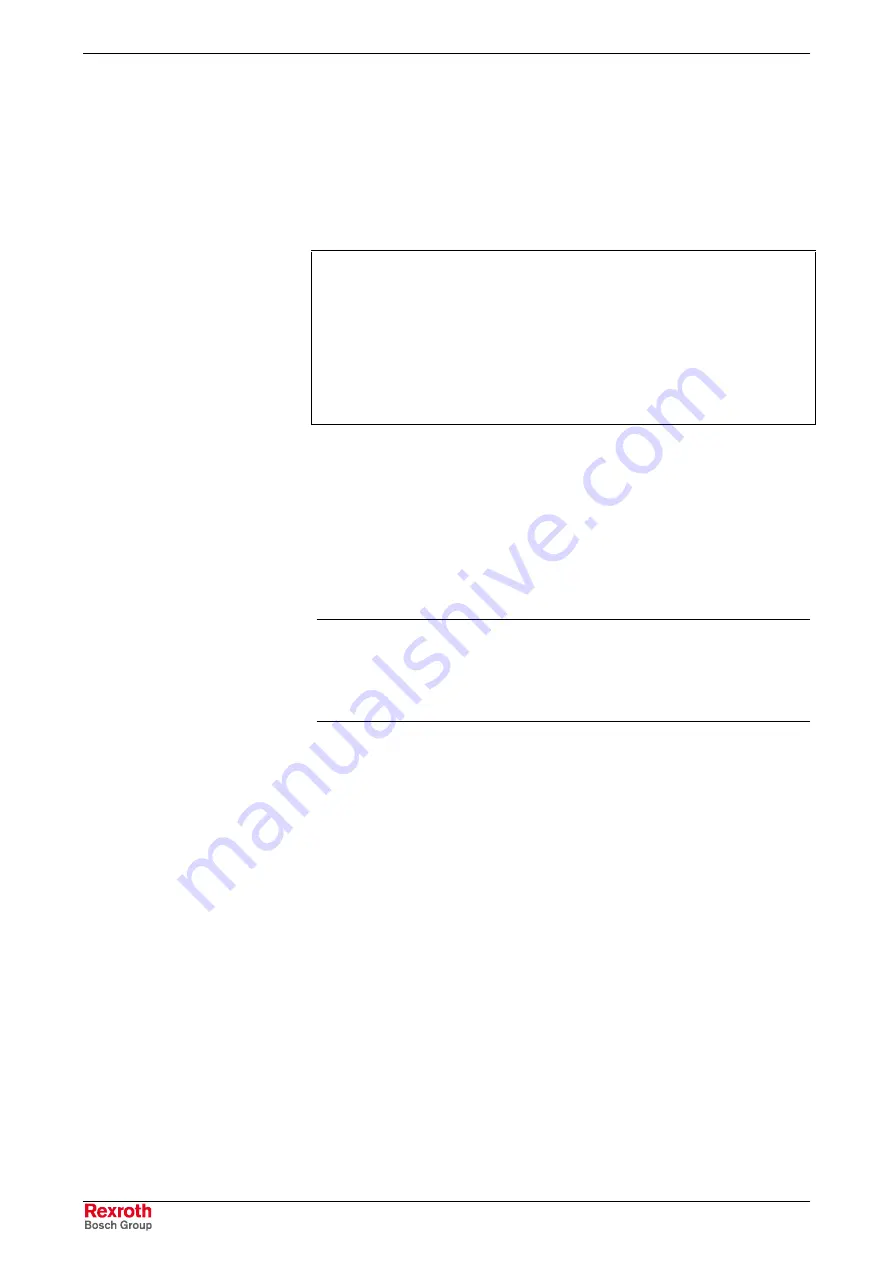
The input value in P-0-0523 required for determining the commutation
offset must be calculated from the measured relative position of primary
part with regard to secondary part (see fig. "Measuring the relative
position between primary and secondary part", distance d, e, f or g,
according to possibility of access), as well as a motor-dependent constant
k
mx
(see "Calculation formulas for P-0-0523" and table "Motor constant
k
mx
for commutation setting").
mx
p
mx
p
mx
mx
k
l
g
mm
P
:
4
point
reference
k
l
f
P
:
3
point
reference
mm
k
e
P
:
2
point
reference
k
d
P
:
1
point
reference
−
−
−
=
−
−
−
−
−
=
−
−
−
−
=
−
−
−
=
−
−
5
.
37
0523
0
0523
0
5
.
37
0523
0
0523
0
P-0-0523:
commutation setting measured value in mm
d:
distance reference point 1 – front side of primary part in mm
1)
e:
distance reference point 2 – front side of primary part in mm
1)
f:
distance reference point 3 – front side of primary part in mm
1)
g:
distance reference point 4 – front side of primary part in mm
1)
k
mx
:
motor constant for commutation setting in mm
l
p
:
length of primary part in mm
1)
:
see fig. above "Measuring the relative position between primary and
secondary part"
Fig. 6-19: Calculation formulas for P-0-0523
Note:
When determining
P-0-0523, Commutation setting
measured value
you have to make sure the preceding sign is
correct.
If P-0-0523 is determined with a negative sign, this has to be
entered!
Calculating P-0-0523,
Commutation setting measured
value
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































