





























MPH-02, MPB-02, MPD-02
Operating Modes
7-47
DOK-INDRV*-MP*-02VRS**-FK01-EN-P
•
Parallel interface
•
Bit
0
of
P-0-4060
has to be configured on a digital input (see also
"Digital Inputs/Outputs" in chapter "Extended Drive Functions").
See also "Command Value Acceptance" in section "Overview of
Operating Modes"
Note:
If bit 0 is different in S-0-0346 and in S-0-0419 when the
operating mode is activated, the selected positioning block is
immediately accepted and executed.
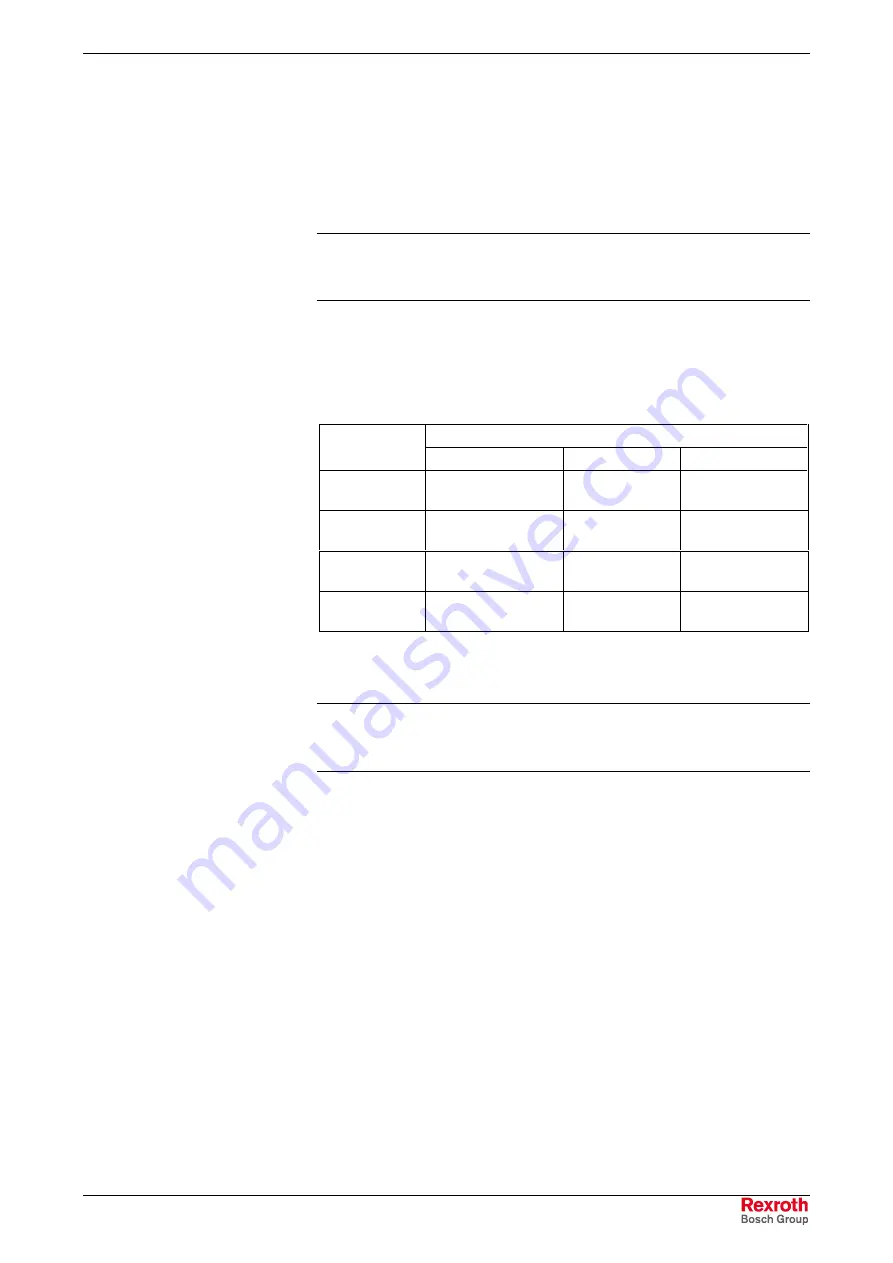
In the positioning block mode, block selection is always carried out via the
content of parameter
P-0-4026, Positioning block selection
.
Depending on the master communication, P-0-4026 can be written in
different ways:
Master communication
Configuration
of P-0-4026
SERCOS interface
Field bus
Parallel interface
via cyclic data
channel
X
X
via digital
inputs
X
X
X
via serial
interface
X
X
X
via field bus
control word
X
Fig. 7-27:
Possibilities of writing parameter P-0-4026 depending on the master
communication
Note:
The assignment of P-0-4026 to digital inputs requires, among
other things, the parameters
S-0-0144, Signal status word
and
S-0-0145, Signal control word
.
Absolute Positioning
•
P-0-4019, Positioning block mode
= 1h
In an absolute positioning block, the target position is a fixed (absolute)
position within the machine co-ordinate system.
For absolute positioning the drive must have been homed.
Requirements for carrying out absolute positioning blocks are:
•
The drive must have been homed.
•
The travel range can be limited with position limit values. Absolute
positioning blocks are only carried out if the target position is within the
allowed travel range.
Block Selection
Parameter Setting
Definition
Requirements
Courtesy
of
CMA/Flodyne/Hydradyne
▪
Motion
Control
▪
Hydraulic
▪
Pneumatic
▪
Electrical
▪
Mechanical
▪
(800)
426-5480
▪
www.cmafh.com







































































